
|
|
|
|
Литература --> Производство жидкого угля клапан 5. Через сальник проходит мечевидный стержень 6, который прикреплен к пор-игаю. Пустотелый мечевидный стержень делается удобообтекаемой формы. В нижней части стерлоня, в мечевидной камере прикрепляется осцил.чятор 7, tco-торый имеет 2 мембраны по обеим сторонам гладкой поверхности камеры. Выдвигание и вдвигание мечевидной камеры достигается вручную, пневматически (как показано па фиг. 20) или же при помощи электрич. приспособления. В большин-. стве случаев прибор ставится с пневматическим устройством. Правильное положение осциллятора поверяется контрольными лампочками. На кораблях большого водоизмещения для получения группового эффекта осцилляторы прикрепляют к борту корабля, располагая их друг над другом. Такое распололгепие дает направляющее действие по горизонтали. Распространение энергии по вертикали является бесполезным для приема и порождает лишь помеху отражением звука от морского дна. г) Ультракоротковолновые (трансанодные) излучатели. В способе подводной сигнализации Ланже-вена для передачи сигналов применяется т. наз. кварцевый конденсатор. Излуча-тельная система со- 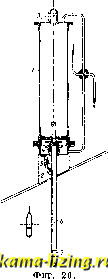 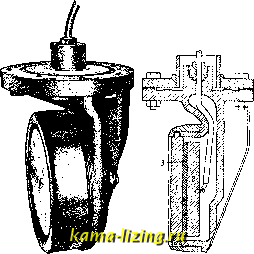 Фиг. 21. Фиг. 22. стоит КЗ кварцевьгх пластинок, склеенных из многих отдельных кусков кварца, имеющих одинаковую толщину и помещенньгх между двумя одинаковыми стальными пластинками (фиг. 21 и 22). Одна из этих стальных пластинок (1) соприкасается с водой, а другая (2) тщательно изолируется от нее. К этим пластинкам подводятся быстрые элек- трические колебания. Система, состоящая из кварца 3 и стальньпс пластинок, обладает определенной частотой собственных колебаний. Благодаря пьезоэлектрическим свой-ствам кварца система приводится в колебательное состояние. Для возбуждения пьезо-э.чектрическ. излучателя применяется ламповый генератор незатухающих колебаний, частота к-рого выбирается равной частоте излучающей системы, около 40 ООО колебаний в ск. Такой передатчик имеет свойство излучать звуковой луч в виде конуса с определенным углом растворения а, при чем sin а = 1,2 , где d-диаметр излучающей поверхности. Отсюда следует, что для получения направленного действия передачи требуется увеличение частоты. Для приема служит точно такая ле система пластинок, как и для передач. Приходящие в воде упругие колебания, достигая приемника, приводят в колебательное состояние воспринимающую систему. Благодаря пьезоэлектрич. свойствам кварца в стальных пластинках появляется электрич. разность потенциалов с частотой приходящих колебаний. Стальные 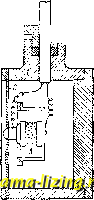  Фиг. 23. Фиг. 24. пластинки соединяют с ламповым приемником, настроенным на соответствен, частоту. 3) Приемники звуковой энергии. В установках для двусторонней акустич. связи осцилляторы б. ч. служат одновременно для приема и для передачи сигналов. В первом случае акустическая энергия превращается в электрическую, а во втором электрическая - в механическую. Кроме того, применяются специальные типы приемников для приема шумов (гидрофон ы). Интересующие нас шумы (гребных винтов, вибрации корабля и другие корабельные шумы) состоят из множества звуков различных частот, составляющих звуковую смесь. Частота отдельных звуков звуковой смеси находится в пределах от 300 до 1500 колебаний в ск. Шумовые приемники проектируются с периодом собственных колебаний, лежащим ближе к нижнему пределу. Шумовые приемники разделяются на электромагнитные, электродинамические и микрофоны инерционного типа. Приемник инерционного типа (фиг. 23) состоит из корпуса 1, наружной мембраны приемника 2 и угольного микрофона 3. Микрофон прикрепляется к мембране приемника и действует за счет инерции капсюля. При таком устройстве изменения гидростатического давления не влияют на действие приемника. Разрез электродинамическ. приемника представлен на фиг. 24. Камера 1 закрыта снаружи мембраной 2; на мембране внутри приемника прикреплен цилиндр 3 с катушкой переменного тока 4. Катушка переменного тока держится специальными держателями 5; 6 - сердечник с катушкой постоянного тока 7. Такой тип приемника применяется главн. обр. при мечевом устройстве (фиг. 25). Если приемник заделывается в борт кораб.чя, например на подводных лодках, то применяется приемник, показанный на фиг. 26. Электромагнитный приемник представляет собою обыкновенный телефон уве.чичеиных размеров. Шумы и трески, свойственные угольным микрофонам, делают их менее пригодными, хотя они и имеют ббльшую чувствительность, чем дру-   Фиг. 25. Фиг. 26. гие типы приемников. Ыа военньгх судах применяются электромагнитные и электродинамич. приемники; хотя они по чувствительности уступают инерционным микрофонам, но зато обладают постоянством чувстви-те.тьности и с успехом допускают усиление. 4) П е л е н г о в а н и е. Звуковое пеленгование заключается в опредо.чении направления на звуковой источник. Из методов пеленгования различают три главных: теневой, бинауральный и максимальный. а) Теневой метод заключается в том, что если имеются два приемника, отделенные звуковым экраном, и если звуковой источник находится на одинаковом расстоянии от обоих приемников, то 3. принимается обоими приемниками с одинаковой интенсивностью. Если же звуковой источник уклоняется вправо или влево, то тот приемник, к-рый стоит б.чил-се к звуковому источнику, принимает звук с большей иптенсивпостью, чем тот, к-рыйопепяетсязвуковым экраном. Есчи с установленными по обоим бортам приемниками требуется определить направление на звуковой источник по интенсивности 3. в телефоне, то д.тя этого требуется изменение курса корабля. Теневой метод применяется б. ч. на судах коммерч. флота для определения звукового пеленга маяков. б) Бинауральный м е т о д. Предло-лсенный проф. Горнбостелем и Вартхеймером метод основан на том обстоятельстве, что человек реагирует непосредственно на тот маленький промежуток времени, к-рый требуется 3., чтобы, достигнтз одного уха, достичь другого, если источник находится в стороне. Эта разница создает у нас впечатление направ.чения. Есчи источник 3. находится в стороне, на 90°, то отставание определяется промел-сутком времени, необходимым 3. на прохождение расстояния между нашими ушами, т.е. ~ 21 см; принимая скорость 3. в воздухе равной 33 300 см/ск, получим этот промелсуток времени равным 0,0006 ск. Для такого же промежутка времени при прохождении 3. в воде соответствует расстояние 90 см. Если 3. приходит со стороны, то, при соответствующем удлинении и укорочении звукового пути каждого приемника, можно получить впечатление 3., исходящего спереди. Такое укорачивание и удлинение звуковых путей достигается акустич. компенсатором. В электрич. компенсаторе запаздывание и опережение компенсируется введением звеньев дроссельного фильтра, состоящего из емкости и самоиндукции. Каждое звено рассчитывается на запаздывание времени в 3-15 ~ ск., что при 21 звене дает звуковое перемещение на 90°. На практике бинауральный метод м. б. применен с успехом только в условиях отсутствия посторонних шумов. При длине подводной базы в 90 см точность пеленгования достигает 1-2°. в) Максимальный метод. Если два приемника расположены друг от друга на расстоянии и соединены одним и тем же телефоном, то звук, принимаемый от источника, находящегося на одинаковом рас-стояшш от приемников, дает максимальный эффект. Если же звуковой источник находится на продолжении линии базы, т. е. приемники сдвинуты но фазе на 180°, то суммарный эффект двух те.яефонов равен нулю. Сдвиг фаз приемников компенсируется до получения максимального эффекта. Зву-копелепгование по максимальному способу дает более точные результаты, чем по би-науральному методу. При нормальном соотношении шумов, принимаемых и собственных, точность пеленгования при максимальном методе на расстоянии 4-5 км достигает 1°. Максимальный метод имеет еще то преимущество, что изменение интенсивности звука в телефоне происходит на максимуме, стоящем обыкновенно выше интенсивности мешающих шумов. Благодаря этому ухо, способное реагировать на изменение интенсивности 3. при условии, что мешающие шумы не превышают 20%, свободно молсет определить пеленг с точностью до 1°. 5) Звуковое измерение глубин. Измерение глубин основано на свойстве от-ралсения звуковых волн. Звуковая волна, исходящая от корабля, отражается со дна в виде эхо к приемнику, установленному на том же кораб.чо. Искомая глубина d определяется из формулы d 11, где v - скорость звука в воде, а t-промелсуток времени мелсду отдачей и возвращением звукового луча. Более точная формула имеет вид: d = c + yV {У-Ь\ -глубина погружения приемника и передатчика, Ь-расстояние между приемником и отправителем. Приборы для звукового определения глубин называются э х о - л от а м и. Главными частями эхо-лота являются 3 в у к о о т с ы .4 а т е л ь, звуков ой приемник и глубиномер. В качестве звукоотсылателя применяются мощный осциллятор или кварцевый излучатель, позволяющие отсылать громкие и короткие знаки на дно моря. Продолжительный звук может вернуться раньше, чем прекратится первичный 3. Отраженный 3. (эхо) улавливается звукоприемником, расположенным на определенном расстоянии от отсылателя в зависимости от типа установки, и перерабатывается в электрич. ток, который поступает в глубиномер. Глубиномер отмечает промежутки времени по электрич. импульсам и определяет соответствующую промежуткам времени глубину. Регистрация промежутков времени в судовых условиях представляет большие трудности, но, несмотря на это, современные эхо-лоты позволяют определять морские глубины с достаточной для мореплавания точностью. Лит.: Aigner Fr., UnterwasserschaUtechnik, В., 1922; L а m b Н., Dynamical Theory of Sound, 2 ed., L., 1925; G r a n d 0 1 1 J., Theory of Vibrating Systems a. Sound, N. Y., 1926. Г. Кериг. VI. Звукоулавливатели. В последнее время развивается еще одна отрасль акустики, имеющая значение в военном деле-подслушивание самолетов и определение их положения по 3. Пока не удалось построить приборы, подслушивающие шумы самолетов с достаточно больших расстояний, так как имеющиеся всегда в атмосфере посторонние шумы (ветры и т. п.) маскируют слабые 3. далеких аэропланов. Введение усиления 3. не улучшает дела, т. к. усиливаются одновременно и подслушиваемые 3. и 3., их маскирующие. Пока удалось довести подслушивание до дальностей порядка 15-25 км, тогда как в тех же условиях невооруженным ухом шум самолета слышен на 8-9 км. Приборы, определяющие направление иа летящий самолет, распадаются на два 1шас-са: работающие по принципу отношения ин-тенсивностей звука, приходящих к правому и левому ушам, и по принципу разности времен. К первому типу относятся т. п. параболоид ы--это отражающие 3. зеркала, имеющие форму параболоида вращения, обычно больших размеров, 2-3 м в диаметре, но малой глубины. Параболоид при помощи соответственных приспособлений м. б. повернут так, что его ось вращения совпадает с направлением на источник 3.; тогда звуковые волны собираются в фокусе параболоида; одна-д ко, вследствие диф- фракции от краев па/ раболоида фокус этот довольно расплывчат. В фокусе помещаются четыре небольших тесно расположенных рупора, одна пара к-рых трубками соединена с ушами одного, а другая-с ушами другого наблюдателя. Отклонение оси параболоида от на-  Фиг. 27. .правления на источник 3. заставляет перемещаться фокус интенсивности 3.; поэтому сильнее воспринимает тот рупор, к устью к-рого перемещается фокус. Наблюдатель, уши к-рого соединены с этой парой рупоров, воспринимает при этом в одном ухе более громкий 3., чем в другом, и выправляет направление, перемещая параболоид при помощи особого штурвала. Одна пара рупоров с соответственным наблюдателем слулхит для определения угла направления в вертикальной плоскости, другая-для определения направления этой плоскости. Другая группа приборов, к к-рым относится изображенный на фиг. 27 звукоулавливатель америк. образца, построена на принципе разности времен. Как показали исследования Стюарта, Горнбостеля и др., различие во временах прихода 3. к одному и дру- 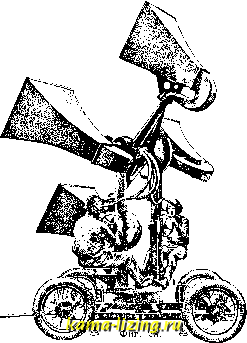 гому ушам воспринимается как ощущение прихода 3. со стороны; именно различие во временах в 3-10 ск. воспринимается как уклонение от прямого направления 3. (прямо перед головой наблюдателя) приблизительно в 3°. Поэтому, если соединить уши наблюдателя с двумя вращающимися на вертикальной оси и расставленными на расстояние I рупорами А и В, то при отклонении направления на 3. на угол а (фиг. 27), 3. запоздает в рупоре А на время (где V-скорость звука) или, т. к. АС = I sin а, на ° . При малых углах отклонения эта величина = : т. к. наименьшая ощущаемая разница времен есть 3-10 ск., то наименьший замечаемый угол отклонения есть . Ttjgjj больше база I, тем меньше ошибка а установки рупоров по направлению 3. В звукоулавливателе одна пара рупоров служит для определения угла направления в вертикальной плоскости, другая-в горизонтальной (фиг. 28).
|