
|
|
|
|
Литература --> Производство газовых тканей 1) Для определения повышения напряжения диаграмма Б.-А.-К. может быть построена по характеристике холостого хода и параметрам машины след. обр. По горизонтали откладывается вектор силы тока /; под углом (р к нему проводят вектор напрялсения на зажимах машины Е (фиг. 42). По известным значениям и Xg тгаходят падения напряженийи Eg, векторы которых в геометрич. сумме с вектором напрялсения Ej образуют вектор эдс якоря Еа. На продолжении вектора Eg откладывают отрезок, равный -и конец последнего соединяют с началом векторов О. На полученную прямую из конца вектора Eg опус-к:ают перпендикуляр, отрезок которого изо-бралсает вектор Eq. От конца вектора Ед по направлению прямой ОЕо откладывают вектор Ед,-тогда получается отрезок ОЕ],, изображающий вектор напряжения холостого хода Eic. При построении этой диаграммы необходимо знать предварительно значения Ед и Ед. Нахождение длины вектора Ед не представляет затруднений, ибо, как указывалось ранее, Ед пропорционально J-TFg и м. б. определено по характеристике холостого хода. В силу этой пропорциональности длина вектора определяется по кривой характеристики холостого хода абсциссой, равной , при чем для нахождения не требуется знания угла г;, потому что со?ф = 0.9/;., -m-w-IXg-A = Const. Что касается падения напрялсения Ед, то его определение также производится по характеристике холостого хода. С этой целью по напряжению, соответствующему на векторной диаграмме отрезку 0G, из характеристики холостого хода находят ампер- 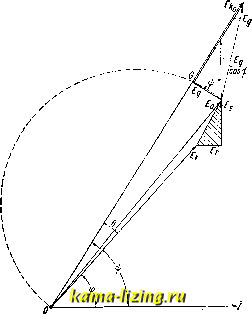 Фиг. 42. витки AW , равные разности ампер-витков возбуждения А1¥,щ и ампер-витков AWg. AWL=AW ,~AW Поэтому для нахождения падения напрялсения Ед нужно к абсциссе AlVm приложить отрезок, соответствующий ампер-виткам AWg] тогда по получен, абсциссе определяются эдс Ео и падение напрялсения Ед. 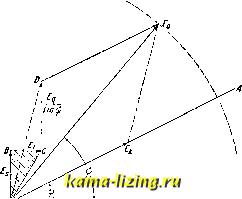 QS-1-.- Фиг. 43. Так как угол г;; определяется из построения векторной диаграммы, то число ампер-витков AWg в этом случае м. б. вычислено по приведенной ранее ф-ле: AWg=lg-AW-\UX. 2) Для о и р е д е л е и и я падения напряжения построение векторной диаграммы Б.-А.-К. возможно лишь приблизительное; при этом диаграмму на основании заданных значений £ 0=71/, 1 и cos строят следующим образом. Из точки О (фиг. 43) проводят вектор силы тока 7; под углом (р к нему из той лее точки проводят прямую OA, затем строят векторы Eg=I-Xg и Е=1 -Га, из конца вектора Е точки С восстанавливают перпендикуляр к вектору силы тока I или к вектору Д. и на этом перпендикуляре откладывают отрезок CD, равный По- сле этого из точки О, как из центра, описывают окружность радиусом OEq, соответствующим заданному напряжению холостого хода Е]с; из точки D проводят прямую DEo, параллельную лучу OA, до пересечения с описанной окружностью; тогда отрезок DEo представит собоюискомое напряжение на зажимах машины Ej для нагрузки / и коэфф-та мощности cos <р. Для построения этой диаграммы должно быть известно Если машина достаточно насыщена и точка, соответствующая номинальному напряжению, лежит за коленом кривой характеристики холостого хода, то в известных пределах можно с достаточной точностью считать, что эдс Ед пропорциональна числу ампер-витков AWg, а следовательно, и --т sin ф пропорционально Так как = Хд. AWa = Const, то при определении угол w может быть неизвестен. Описанные выше построения векторных диаграмм Б.-А.-К. выполнены в предполо- лсении, что коэфф-т магнитного рассеяния машины остается постоянным при изменении нагрузок. В действительности же коэфф. магнитного рассеяния изменяется с нагрузкой, хотя это изменение невелико (в самых неблагоприятных случаях не превосходит 7-8%). Если же принять во внимание, что коэфф-т магнитного рассеяния оказывает влияьше только на амнер-витки, потребные для проведения полезного потока машины через ярмо магнитной системы и полюсные сердечники, то вполне можно пренебречь изменением коэфф-та рассеяния для машин, не особенно сильно насьщенных. Когда машина сильно насьпцена, то учет изменения коэфф-та рассеяния при построении векторной диаграммы напряжения производится следующим образом. На основании описанных выше способов построения, по данным, значениям Е;., Е, Eg и находят (фиг. 42) вектор Ой=Е +Ег+Е+Ёд и угол 1), а по значению последнего и AWg = Ig A}Va sin Ц). Если, как это делалось выше, из характеристики холостого хода определить по значению вектора 0D число соответствующих ампер-витков ОА (фиг. 44), то влияние изменения коэфф-та рассеяния на найденное значение аМнер-витков остается неучтенным. Если ясе, с другой стороны, на кривой характеристики холостого хода отложить ординату, равную 0D (<Уь и -коэфф-ты рассеяния при нагрузке и холостом ходе), то соответственно этой эдс приходится изменять число всех ампер-витков, тогда как изменение коэфф-та рассеяния должно оказывать влияние лишь на ампер-витки ярма и сердечников полюсов. Поэтому, для более точного учета влияния изменения коэффициента рассеяния, рекомендуется поступать так: из точки В[ кривой характеристики холостого хода провести линию, параллельную 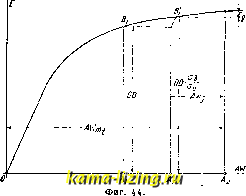 прямолинейной части начала кривой характеристики; точка пересечения этой прямой с прямой, проведенной параллельно оси абсцисс через конец ординаты, равной 00, и даст искомое число ампер-витков, необходимых для наведения эдс 0D при измененном коэффициенте рассеяния. Таким образом, отрезок AjAi изображает в данном случае увеличение числа ампер-витков, вызванное увеличением коэфф. рассеяния. Так как прямолинейная часть начала кривой характеристики холостого хода не вполне точно представляет магнитную характеристику междужелезного пространства и тела якоря, то при описанном графхтческом способе определения числа ампер-витков получается несколько преувеличенное значение последних. Эту ошибку можно компенсировать некоторым уменьшением отношения у . Эдс холостого хода Eq находят по сумме ампер-витков 0А{+А Wg=АА2. И. Диаграмма Потье. Для синхронного Г. п. т. с распределенной обмоткой возбуждения, когда поля якоря машины имеют одинаковое магнитное сопротивление, необходимость в разлол-сении ампер-витков якоря А на 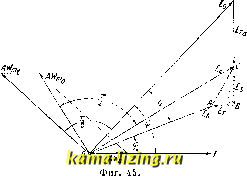 AWg и AWg отпадает. В этом случае вектор эдс реакции якоря Е, представляющий геометрическую сумму векторов Ед+Ед, располагается перпендикулярно к. вектору силы тока, так как при кд=Хд получается На фиг. 45 изображена векторная диаграмма для случая индуктивной нагрузки Г. п. т., при чем на диаграмме нанесены векторы ампер-витков: J.TF ,j---соответствующих эдс холостого хода Е, AW-соответствующих эдс реакции якоря Е и А W- соответствующих эдс якоря Е. Вектор AW является результирующим векторов AW и AW , при чем соответствующая числу ампер-витков AW, эдс Е зависит от насыщения машины.,-определение ее надлежит производить путем построения диаграммы ампер-витков. Прочие составляющие общего падения напряжения Г. п. т. от насыщения машины не зависят, а потому могут быть построены непосредственно. Т. о., векторная диаграмма напряжения распадается на две диаграммы: диаграмму ампер-витков, на основании которой определяется падение напряжения, вызываемое реакцией якоря, и диаграмму эдс, учитывающую падение напряжения от сопротивления (эффективного и индуктивного) обмотки якоря. На фиг. 46 указано построение векторной диаграммы Потье для случая емкостной нагрузки синхронного Г. п. т. Построение диаграммы Потье м. б. осуществлено по характеристике холостого хода и параметрам машины. 1) Для определения повышения напряжения диаграмма строится следующим образом. По заданным I,. cos 95 и сопротивлениям гд и Xg, путем сложения векторов находится вектор результирующей эдс якоря (фиг. 46). Из характеристики холостого хода, по получен результирующей эдс Еа находят AWm, вектор этих ампер-витков, в предположении отсутствия влияния гистерезиса, должен опережать вектор Е на угол , поэтому он на диаграмме откладывается перпендикулярно к отрезку ОС в положительном направ.пении вращения векторов. Вектор ампер-витков реакции якоря AWa на диаграмме д. б. нанесен совпадающим с вектором силы тока /. По найденным 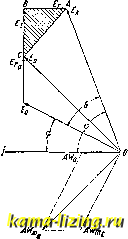 Фиг. 46. AW и вьгаисленным АТГ =0,9/-т-ад / нетрудно определить и AW-вектор ампер-витков возбуждения, так как AW. является геометрич. разностью между J-PF и AWa (фиг. 45). После нахождения AW напряжение холостого хода машины определяется по характеристике холостого хода (фиг, 47). 2) Для определения падения напряжения диаграмма Потье, так же как и диаграмма Б.-А.-К., не может быть точно построена за отсутствием данных относительно угла хр. Диаграмму в этом случае строят так. Под углом ср к вектору силы тока проводят луч прямой 0Q, дающий направление вектора Ej. (фиг. 48), а под углом у = 1,05 9? If (для индуктивной нагрузки) -линию ОС, представляющую направление вектора эдс Е; это соотношение между 7 и </> в большинстве случаев бывает весьма близким к действительности. Под углом + ~ к линии ОС проводят прямую, дающую направление вектора AW t, а на обрат, продолжении вектора / откладывают вектор Л И-я и проводят прямую KN, параллельн. направлению Л TF, .T. к. Ео известна, то по характеристике холостого хода молшо найти AW; приняв AW за радиус, а точку О за центр, описывают дугу до пересечения ее с прямой KN. Т. о. находят направление и величину вектора AW j, а по последним-из характеристики холостого хода-и i/ = ОС После определения вектора Еа строят тр-к падения напряжения СБА, в котором, если угол у был принят правильным, вершина А должна 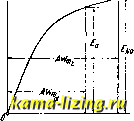 Фиг. 47. попасть на прямую 0Q (направление вектора Е). Если этого совпадения вершины тр-ка не произойдет, то необходимо построение повторить, изменив соответствующим образом угол /. Если при построении векторной диаграммы Потье приходится вводить поправку на изменение коэффициента магнитного рассеяния при нагрузке, то эта поправка м. б. сделана аналогичным образом, как и при построении диаграммы Б.-А.-К. Для машин, не сильно насьпценных, введение поправки на изменение коэфф-та рассеяния никакого практического значения не имеет, поэтому обычно ее не делают. Диаграмма Потье представляет по существу диаграмму Б.-А.-К., примененную к машине с распределенной обмоткой возбуждения; потому 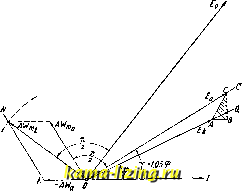 Фиг. 48. теоретически она применима лишь для этого типа синхронных машин. Практически ока-зьшается, что диаграмма Потье приложима также и для машин с явно выр-женными полюсами, и расхождение результатов с теми, к-рые дает диаграмма Б.-А.-К., получается незначительным, в особенности для тех случаев, когда й/ не очень мало и cos q><l. Т. к., кроме того, диаграмма Потье строится значительно проще, чем диаграмма Б.-А.-К., поэтому она и нашла себе более широкое применение в практике. Ранее было уже указано, что построение диаграммы Потье связано 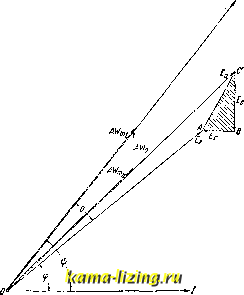 Фиг. 49. с отысканием угла у и требует, при неудаче, второго, а иногда и третьего построения; поэтому при практич. испытаниях синхронных машин обычно довольствуются построением
|