
|
|
|
|
Литература --> Графическое определение перемещений ДЕФОРМАЦИЯ 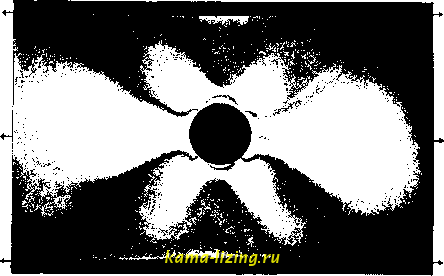  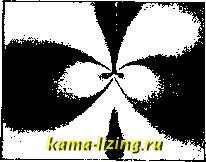 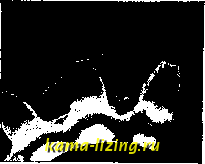 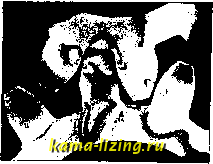 17 IS М. l.,imiiiiK OI iieptrmi на рпснрсдолснис нпнряженнГ! при расмяжснпп. 1о. 11,ирн/кч пня п кпнио 11Н1НЫ pacTiiiHRMcMiim прямоуги.и.пого руска. IIJ. Илняпн!.- круглого огисрс;ня к конце ipvinHin.i рас 1 ягпиасмо! о оруска. 17. Iacnpc.U.icHlic иапряжснш! i; lin.C г<-рпс, насажснио!! иа и.Л. IN. IacniH/-jU.icHiie напря>;еп1н 1 и nicciepnt под aeiknnicM I.ixinunoniui о момлша. Т Э. новка Кирпичева и Зайцева (фиг. 3). Она состоит из 2 марблитовых (зачерненных) зеркал, из к-рых зеркало Р воспринимает свет от электрич. лампочек и отбрасывает его в виде поляризованного пучка, проходящего  Фиг. 2. через испытуемый образец, помещенный в прессе Q; второе зеркало А служит анализатором, в к-ром отралеается деформированный образец. Обычно испытание производится над образцами из стекла или ксилонита. Лучшим из них является последний, т. к. не будучи столь хрупким как стекло, он обладает лучшей двупреломляющей способностью, так что пригоден для опытов уже при толщине 2-3 мм; кроме того, он легко подвергается обработке лобзиком и стамеской. Определение Д. в брусьях и стержневых системах. В повседневных задачах техники приходится иметь дело преимущественно с брусьями и стержнями, т. е. с элементами, имеющими небольшие поперечн. размеры по сравнению с длиной; такое соотношение размеров позволяет гЗламп ок. 8(Ю свечей  Фиг. 3. пренебречь влиянием поперечньгх Д. и рассматривать брусья и стержни как состоящие из бесконечно малых элементов длиной ds с постоянным поперечным сечением. При этих условиях вывод общего выражения Д. или перемещения можно сделать, исходя из начала возможных перемещений, согласно к-рому работа сил, приложенных к находящейся в равновесии материальной системе, на любьЕх бесконечно малых возможных перемещениях равна нулю, следовательно, в упругих системах сумма работ внешних и внутренних сил равна нулю. В общем виде работа внешних сил м. б. представлена в виде произведения в к-ром под S/ подразумевается любая внешняя сила, пара или момент, а под 5,-соответствующее им линейное или угловое перемещение. Работа внутренних сил м. б. выражена через слагающие внутренних сил, приложенных к любому бесконечно малому элементу длиной ds и определяемых ве.яичинами: нормальной силой ЛГ, поперечной силой Qn изгибающим моментом М, и через соответствующие им деформации: продольное удлинение Ads, поперечный сдвиг Ldy vl поворот сечения при изгибе tidp. Исходя из принципа независимости сложения действий, работу внутренних сил для любого бесконечно малого элемента можно выразить так: йТ = 37Дй.9 + Qdy -f mdw , а для всего тела она определится интегралом из этого выражения. Т. о., исходя из условия равенства нулю суммы работ внешних и внутренних сил и учитывая, что работа внутренних сил противоположна по знаку работе внешних сил, можно написать, что: = jN,Ads + j QjAdy + / m,Ad<p . (15) Если деформации вызваны приращением какой-либо внешней силы S, то величины Ids, Ady и Adq> для каждого бесконечно малого элемента выразятся так: Ads = ds , Ady=k ds , Adp = §fds, где J и со соответственно-момент инерции и площадь сечения, к-коэфф., зависящий от формы сечения (в прямоугольных сече- ПИЯХ Л; =-, в круглых-fc=) . Если Д. вы- О 27/ звана изменением темп-ры, то Ads= atods, Ad(p = a~ ds , где -темп-ра осевого волокна элемента, равная ~(fi+f), и At-разница температур крайних волокон, равная(1- У; с-толщина сечения. Подставив эти выражения Д. в ф-лу (15), получим: S,d, ,=jN,ds+atoJ.Nkds+kJ Q,ds+ + f M,ds + aAt Jm/-> (16) где й;;. -перемещение .S. под влиянием изменения S. Когда рассматриваются Д. в сочлененных системах (фермах и т. п.), в которых внутренние силы определяются только продольными усилиями N, а площади поперечных сечений по длине каждого стержня обычно постоянны, выражение (16) приводится к такому: 2= 2Й + 2*° (17) в котором л-длина каждого стержня между шарнирами. Выражения равенства работ (16) и (17) не изменятся, если вместо ряда внешних сил будет действовать одна сила S = l, вызывающая внутренние силы iV., Qii и момент М], но они нриведутся к виду = / N, f, ds -f at, jN,ds +kfQ, ds + ds + aAt J-Ыз , (18) hm-Xkf + tk- (19) В таком виде эти выражения известны под названием ур-ий Мора и служат для непосредственного определения перемещений, для чего в соответственных точках системы прикладываются по направлению искомого перемещения сила, равная 1,если определяется линейное перемещение, или момент, равный 1, если определяется поворот сечения, или, наконец, пара с моментом, равным 1, и плечом, равным длине стержня, если определяется поворот стерлшя. Эти единичные силы и моменты называются фиктивными, или воображаемыми, и служат только для определения перемещений. В тех случаях, когда определяется перемещение по направлению действующей силы или момента, для определения его удобно пользоваться теоремой 1-Састильяно, по к-рой перемещение определяется как частная производная из выражения потенциальной энергии по соответствующей силе или моменту: дОк dSk ds-{- J EJ dSk (20) Нетрудно, однако, видеть, что это выражение представляет собой частный случай выражения (18), так как всегда молшо представить, что Nii=N.-S, Мд. = М- 8я; и т. д., а потому величины производных = N]c, Эпюра ц.т. Фиг. 4. g=Mfc,..., что приводит выражение (20) к виду (18). Обычно при вычислении перемещений пренебрегают влиянием поперечной силы Q на Д., т. к. оно незначительно по сравнению с влиянием продольной силы и особенно момента. Влияние Q нарастает с увеличением поперечных размеров по отношению к длине. В системах с прямыми осями (балки, рамы и т. п.) процесс интегрирования по ф-лам (18) и (20) с успехом м. б. заменен вычислением влияния моментов по их эпюрам, что м. б. сделано или приемом Мора-путем рассмотрения эпюры как фиктивной нагрузки, или приемом Верещагина-путем сопоставления эпюр действительной и единичной нагрузок. Эпюры единичных нагрузок всегда имеют очертания по прямым, наклоненным под углом а к оси стержня; эпюры от действительной нагрузки могут иметь криволинейное очертание. Для калодого прямого участка эпюры момент от единичной нагрузки всегда м. б. выражен через ординату эпюры z=x tg а, где x-расстояние ординаты от нулевой точки пересечения прямой, очерчивающей эпюры, с осью стерлшя (фиг. 4). В соответствии с этим, входящий в выражение (18) интеграл может быть приведен к такому виду: /Ж,рй. = =/(йх).. (31) Оставшийся под интегралом мнолситель -у dx представляет собой элемент площади эпюры моментов от действительной нагрузки на участке dx, измененный в отношении 1 : J; при постоянном моменте инерции последний выходит за знак интеграла. Самое же произведение dxy, представляет собой статическ. момент той же площади относительно нулевой точки единичной . эпюры, а потому весь интеграл м. б. выражен в таком виде: i/(d=%i3 =i?. (22) В этом выражении Q-площадь всей эпюры момента от действительной нагрузки-изменена в отношении 1: J, а xtg а определяет собой ординату z эпюры единичной нагрузки под ц. т. площади эпюры от действительной нагрузки. Т. к. в этом выражении перемещение определяется произведением площади на соответствующую ординату, то знак его определяется алгебраически по знакам эпюр. При ломаном очертании эпюры единичных нагрузок полное перемещение определяется суммой произведений Qz каждого участка. Напр., пусть требуется определить горизонтальное перемещение точки К ломаного бруска (фиг. 5) под действием  горизонтальной силы Н, приложенной на левом конце бруска. На фиг. 5, а и б, показаны эпюры моментов от действительной и единичной нагрузок. По ф-ле (22) перемещение выразится так: 2 2 4 2 1 7 1 Hh 2 6 h h 2 * 3. bHh> Hh 2 2 Аналогичные приемы расчета по эпюрам могут быть сделаны также и для интегралов, содержащих JV и Лит.: Общая: Ясинский Ф., Собрание сочинений, т. 3, СПБ, 1902; Митинский П., Строительная механика. Сопротивление материалов, СПБ, 1911; Тимошенко С, Курс теории упругости, ч. 1, СПБ, 1914; Love А., А Treatise on the Mathematical Theory of Elasticity, Cambridge, 1928; Clebsch A., Theorie d. Elastizitat fester Korper, Lpz., 1862; Clebsch A., Theorie de Iela-sticite des corps solides. P., 1883; Lame, Lecons sur la th6orie mathem. de 1 elasticite des corps solides, 2 ed.. P., 1866; d e S a i n t- V e n a n t. La resistance des corps solides. P., 1864; Boussinesq, Applications des potentiels u 1etude de Iequilibre et du mouvement des solides elastiques, P., 1885; Neumann F., Vorlesungen ijber die Theorie d. Elastizi-tat d. festen Кбгрег und d. Lichtathers, Lpz., 189 5; Love A., Lehrbuch d. Elastizitat, Lpz.-В., 1907; T e d 0 n e 0., Aligemeine Theoreme d.mathem.Elastizitatslehre (Integrationstheorie), Enzyklopadie d.math. Wiss., B. 4, Abt. 2, H. 1, Lpz., 1907. Оптический метод: Кирпичев В., Оптическое изучение упру-
|