
|
|
|
|
Литература --> Графическое определение перемещений Решая совместно ур-ия (9) и (11), получим: - Уо = ( о (§h - Qo) = < о 2 Va -Vo=0}o (Qa - Qo) = - Из уравпений (12) легко получить (12) (13) ф-ла (13) показывает, что разность угловых скоростей колес А к В прямо пропорциональна расстоянию между колесами, средней линейной скорости машины и обратно пропорциональна радиусу колеса и среднему радиусу закругления. Если машина идет по прямолинейному пути, то (о={), и из уравнения (13) найдем, что ш =со . Если одно колесо, например А, остановить, то v =0, и из уравнения (12) получим го = о>о -, откуда = соо а- (14) Наконец, если повертывать машину при во = О, то Va=-<o (15) Соотношения (14) и (15) соответствуют очень крутым поворотам и практически невозможны, т.к. передние колеса по своей конструкции не приспособлены для этого. Что же касается задних колес, то все отмеченные выше функции они могут выполнять при помощи Д. С этой целью задняя ось разрезается па две части, чтобы предоставить возможность колесамАиВ иметь разные скорости, затем разрезанные части этой оси соединяются между собой при помощи Д. Схема Д. показана на фиг. 7. Здесь Oi и 0. две части задней оси, на каждой из к-рых укреплено по коническ. зубчатке К и М. Шестерня В заклинена наглавном валу машины А и сцеплена с коронной зубчаткой D. В этой последней в ободе имеются специальные втулки, в к-рых вращаются планетные шестерни С, С (две, три или четыре). Планетные шестерни сцеплены сразу с обоими колесами К и М. Движение от лшшины через вал А передается коронному колесу D и отсюда через шестерни С, С обоим колесам с одинаковой скоростью. Если теперь вал машины затормозить и повернуть одно колесо, напр. Ж, по часовой стрелке, то нетрудно убедиться в том, что при этом колесо К повернется в противоположную сторону, при чем скаляры угловых скоростей будут для обоих колес равны друг другу, в соответствии с формулой (15). Если 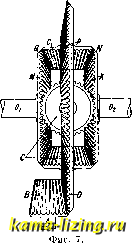 затормозить колесо М, то скорость точки Q на начальной окружности зубчатки будет равна нулю, а скорости центра нланет-ной шестерни Р и точки N на начальной окрулшости другой зубчатки будут пропорциональны расстояниям этих точек от точки Q, являющейся в этом случае центром мгновенного вращения иланетной шестерни, т. е. Vyi=2Vp. Это находится в полном соответствии с ф-лой (14). Из конструкции Д. видно, что если угловая скорость одного ко-.яеса, напр. М, окажется больше угловой скорости коронного колеса на нек-рую величину, то ровно на такую лее величину скорость колеса К окажется меньше скорости коронной зубчатки. Это соответствует ф-лам (12). Конструктивно автомобильные Д. выполняются различно. Наиболее распространенной является система, соответствующая схеме, представленной на фиг. 7. В продольных Д. на валу машины (например, сист. Mercedes) укреплены поперечные пальцы, на которых вращаются конические сателлиты. От этих последних через втулки движение передается непосредственно зубчаткам, к-рые укреплены на концах полуосей. Такие Д. применяются в машинах Mercedes, La Bulre, грузовиках Renault и др. Д. банкаброшный. Основные детали банкаброша (фиг. 8) состоят из вытяжных цилиндров а, а, веретена с рогулькой /5 и катушки у, на которую наматывается пряжа 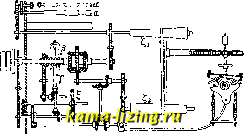 Фнг. 8. (ровница). Т. к. цилиндрами а в единицу времени подается одно и то же количество ровницы, а по мере наматывания ее на катушку диам. початка возрастает, то, очевидно, скорость вращения катушки нулшо изменять. При этом одновременно выполняется другая операция-крутка ровницы веретеном. Крутка эта д. б. постоянной. Т. о., получается задача: дать постоянное число оборотов веретену и переменное по известному закону-- катушке. Катушка поэтому выполняет два движения: вместе с веретеном она участвует в процессе крутки и получает число оборотов веретена и, кроме того, имеет дополнительные обороты, положит, либо отрицательные, для намотки ровницы, при чем скорость этого дополнительного двилсения должна меняться но мере нарастания початка и увеличения диам. мотки. Сложное движение катушки осуществляется в банкаброшах при помощи Д. Вся установка Д. здесь существенно отличается от автомобильной тем, что там колеса сами используют предоставленную им лишнюю степень свободы, а у банкаброшей оба двилсения Д. выполняются по наперед заданным кинематическ. условиям. Одно движение синхронно с движением веретена, следовательно, идет с постоянной заданной скоростью. Другое регулируется коническими барабанчиками d и Сг, от которых через Д. вращение передается катущкам. От этих же конич. барабанчиков движение идет еще, помимо Д., к каретке, поднимающей и опускающей при помощи реек катушки в процессе мотки. Скорость этого подъема изменяется по мере нарастанХГя диаметра початка. Именно, пусть щ-полное число оборотов катушки, а щ-веретена, б-толщина одного витка пряжи, D-диам. мотки (толщина початка, взятая по средним линиям витка), L-длина ровницы, выпускаемой в единицу времени, v-скорость движения каретки; тогда ЬлВ{щ-щ), (16) г; = (п-Пй)6= . (17) При переводе ремня на конич. барабанчиках одновременно изменяются скорости катушки (через Д.) и скорость подъема каретки (помимо Д.). Установим закономерности в этих изменениях. Данные выше ф-лы (3) и (8) показывают, в применении к банкаброшам, что число оборотов катушки можно составить из двух компонентов на Д. п[ и ni, при чем один из них, например , можно подобрать так, что он будет передавать катушке ровно столько оборотов, сколько имеет веретено, и это число м. б. постоянным. Другой же компонент ni будет тогда управлять разницей скоростей между веретеном и катушкой. Первый компонент д. б., следовательно, вне влияния конических барабанчиков, а второй, наоборот, под их влиянием. В этом случае перемена скоростей на конич, барабанчиках д. б. пропорциональной скорости относительного движения катушки по веретену, т. е. скорости мотки. С другой стороны, скорость подъема каретки, как видно из ф-лы (17), изменится так же пропорционально относительной скорости катушки по веретену. Т.о., при перестановке ремня на конических барабанчиках механизм будет работать правильно. Из той же ф-льг (17) мы видим основания для проектирования конич. барабанчиков, так как зависимость между диам. наматывания и скоростью поступательного движения каретки здесь определяется в форме vD=Const, т. е. равнобочной гиперболы. Конструктивно банкаброшные Д. отличаются от автомобильных тем, что для упра-  Фиг. 9. Фиг. 10. вления каждой частью движения в них имеются приводные шестерни. Их д. б. 3: одна коронная и две сцепленные с зубчатками Д. Другая особенность заключается в том, что оба колеса Д. if и М (см. выше) здесь могут вращаться и в одном и в противоположных направлениях, чего нельзя сделать у автомобиля, т. к. у банкаброша от Д. до ка- тушки имеется целый зубчатый перебор, с помощью к-рого направление вращения легко изменяется. Наконец, вал Д. здесь можно не разрезэль, а выполнить его в виде двойного: одного сплошного, а другого трубчатого. На фиг. 9-12 показаны разрезы   Фиг. 11. Фиг, 12.  нек-рых ходовых конструкций: Goodsworth (9), Tweedele (10) с конич. сателлитами; Curtis & Rhodes (11) и Brooks & Doxey (12)- с цилиндрическими. Особую конструкцию представ.яяет Howard & Bullough (13). Здесь на косо срезанной широкой цилиндрич. трубе А-А. скользит дисковый бурт двойной конич. зубчатки В-В, сцепляющейся одновременно с колесами if и Ж. При повороте коронной шестерни С труба А поворачивается, вместе с тем двойная зубчатка В, повертываясь на шаровой поверхности В, катится по зубчаткам К ж М. Д.-регулятор. Из общей теории Д. вытекает возмолшость еще одного важного использования его. Фиг. 4 показывает, что если колеса К я М вращаются в разные стороны с одинаковой скоростью, то рукоятка будет неподвилсиа. Напротив, она приходит в движение, как только скорости этих колес оказываются неодинаковыми. В этом виде механизм употребляется у морских судовых двухвинтовых машин для обеспечения равного числа оборотов обоих винтов. Как только ЭТО равенство нарушается, приходит в движение рукоятка Д., кинематически действующая на паровпускные органы обеих машин, и регулирует, т. о., их работу. Существует много конструкций и областей применения дифференциала. Лит.: [] Малышев А., Анализ и синтез механизмов с точки зрения их структуры, Известия Томского технологического ин-та , Томск, 1923, т. 44, вып. 2; Малышев А. П., Прикладная механика, ч. 1, вып. 2-Структура и синтез механизма, Новопи-колаевск, 1923. Таггарт Б. С, Прядение хлопка, т. 2, М., 1923; Кирпичев В. Л., Конспект лекций по прикладной механике, СПБ, 1910 (литогр.); Хан-тон В. А., Механика текстильных машин, пер. с англ., Иваново-Возиесенск, 1927; Burkard Р., Discussion du mouvement differentiel, Lindustrie textile*, Paris, 1889; Pag 6 The Modern Gasoline Automobile, N .Y., 1924; В о u a s s e H., Theories des vecteurs, Cinematique, Mecanismes, P., 1921; И i sco X Gr.,MechanicalAppliances,MechanicalMovements, 5 ed ., L.,1925; Brown H. Т., Bewegungsmechanis-men. aus d. Engl, ubers., Lpz., 1925. A. Малышев. ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ, отдел геометрии, изучаю1ций свойства кривых и поверхностей методами анализа бесконечно малых. Д. г. разделяется на теорию кривых, плоских и пространственных, и теорию поверхностей. Теория плоских кривых. Плоская кривая м. б. задана в декартовых координатах ур-ием у-Кх), (1) Е{х,у)=0. (2) Наряду с этими двумя видами, часто пользуются более симметричным представлением кривой в параметрической форме: x=(p{t), yrpit)- (3) При изменении параметра t точка (х, у) перемещается по плоскости, описывая кривую (если t обозначает время, то параметретеск. ур-ия характеризуют движение точки, а кривая является траекторией двилсения). Па-раметрич. форма является наиболее общей; напр., в этой форме получится уравнение (1), если мы положим: х= t, y = f{t). В случае уравнения (2) у оказывается, вообще говоря, многозначной ф-ией от ж; при представлении кривой в форме (3) часто удается подобрать для (р я гр однозначные ф-ии. Пример. Ур-ие окружности в форме (2): а;27/2=а2; в форме (1): y=±Va-x; в качестве параметр ич. формы можно взять: x=acos t, y=asin. t. Наряду с декартовыми координатами кривая м. б. задана ур-ием в полярных координатах: r=F((p). Длина дуги кривой определяется как предел длин вписанных ломаных, когда длины звеньев ломаной стремятся к нулю. Методами интегрального исчисления доказывается, что этот предел представляется в виде интеграла. Для ур-ий (3) имеем следующее выражение длины дуги s: т 5 = / V[<p{t)y + [xpiijf dt, где to и Т-значения параметра t, соответствующие началу и концу дуги; отсюда для вида (1), в частности, имеем: ь s = SVl+y dx. Для дифференциала дуги получаем выражение: dsy[(p\t)f + [4>\t)fdt, или, возводя его в квадрат и замечая, что (p{t) dt= dx и rp(t) dt = dy, получаем: ds = dx + dy . (4) Последняя ф-ла справедлива в какой бы из трех форм ни была задана кривая. Если ур-ие кривой дано в полярных координатах, то выражаем х п у через г и (р (ж=г cos ср и y=rsin (р); дифференцируя эти выражения и подставляя в ф-лу (4), получаем: ds = dr + r-d<p. Пример. Цепная линия: = (/ + е); ds = Vl+y~dx = Длина дуги от ж=0 до ж=Х: e+e)dx-lA-e~). Ур-ие касательной и нормали. Касательная определяется как предельное положение секущей ММ, когда точка М неограниченно приближается к М (фиг. 1). В дифференциальном исчислении доказывается, что для кривой, заданной в форме (1), угловой коэффициент касательной в тОчке М равен значению производной: Таким образом, ур-ие касательной в данной точке M(jx, у) напишется так: Y-y = fjX-x), где X, Y-текущие координаты точки на касательной. В случае параметрической формы dy у(0 dx 9>(t) Нормалью называется прямая, проходящая через точку прямой перпендикулярно к касательной в этой точке. Ее ур-ие: Х-гЕ-Ь(Г-2/)=0. В Д. г. определяются отрезки касательной MQ п нормали MR от точки прикосновения до пересечения с осью абсцисс (фиг. 1): Проекции этих отрезков на ось абсцисс носят названия: QP-подкасательная, PR-поднормаль. Их выражегшя таковы: Предельное полол-сение касательной, когда точка прикосновения удаляется по кривой в бесконечность, есть асимптота (см. Асимптотическое приблиоюение). Методами 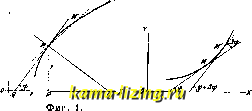 Фиг. 2. дифференциальной геометрии исследуются выпуклость и вогнутость (см.) плоской кривой и в связи с этим точки перегиба, а также особые точки кривой. Кривизна плоской кривой. Кривизну можно рассматривать как меру укло-нениякривой от касающейся ее прямой. Проводим касательную к кривой в точке М(х, у) (фиг. 2); берем близкую точку кривой М; касательная в ней образует с первоначальной касательной угол Д?; пусть длина дуги ММ есть As. Отношение назовем средней кривизной кривой на дуге ММ. Когда точка М неограниченно приближается к М, отношение стремится к пределу К; -К = есть кривизна кривой в точке Ж. Если произведем это вычисление для круга радиуса г, получим К = для прямой, очевидно, в каждой точке К = 0. Для вычисления кривизны в
|