
|
|
|
|
Литература --> Доменное производство металла жа площадки Р уменьшаются, а площадки двойного среза F увеличиваются, а при более медленном-наоборот. Однако, по мнению некоторых исследователей (Горячкин, Крамаренко, Нахтве), отрипательное значение площадок Р не имеет большого значения, т. к. здесь происходит отгиб стеблей; притом отгиб стеблей влечет за собою косой срез стебля, что, как показывает практика, даже облегчает работу машины. Что касается площадок F, то они являются вредными, т. к. нож бесполезно вновь перерезает уже срезанные стебли и обрезки засоряют пальпевый брус. Угол наклона лезвия нояа по отношению к направлению движения делается различный. Проф. Горячкин дает зависимость между величиной этого угла а, скоростью поступательного движения машины v и линейной скоростью вращения кривошипа cor в виде формулы: где О)-угловая скорость кривошипа и г- его радиус. Ф-ла выводится след. обр. Абсолютное движение ножа слагается из: 1) относительного движения от кривошипа вдоль пальцевого бруса и 2) поступательного двии?ения пальцевого бруса вместе с машиной. Первое дает перемещение х=г (1 -cos col) со скоростью M = -7- = rcosm cot ; (it второе дает перемещение y=vt со скоростью = Абсолютная скорость = (ЖУ{Ш [/. + rWslncot имеет направление под изменяющимся углом к лезвию (фиг. 6) и м.б. разложена на две скорости: w,-с к-рой нож перерубает стебли, и -с к-рой нож перерезает стебли скользящим движением (перепиливает); эта скользящая скорость изменяет свою величину и ш, может иметь нулевое или отрицательные значения. Нулевое значение нежелательно; поэтому криво-Фиг. 6. шипу надо придать такую скорость, чтобы онаперехо-дила через нуль только один раз или, еще лучше, не достигала его. Эта скорость равна Wj = VCOS а - corsln asin (f , где <F-угол, образуемый касательной к синусоиде с направлением движения машины. При wO V cos а - cor sin asin Р О , откуда tga:----. corsin <p Правая часть неравенства получает наименьшее значение при угле р=, следовательно, S - По данным Нахтве, для америк. машин, при vImjck: для косилок . . . .0=20-43°; си?-=1,375-1,95 лг/ск для жней......а=31-37,5°; сиг = 1,1 -1,3 для сноповязалок . а=31-43°; сог=1,1 -1,5 Горячкин дает: для косилок.............а=27-46° для жней...............а=37-42° для сноповязалок..........а=33-42° По испытаниям автора, при v = 1 м/ск, угол asS21°43, и но и,змерениям для косилок он оказался равным 28-32°. Для определения наивыгоднейшей угловой скорости кривошипа, обуслов.ливающей  соответствующую скорость ножа, Горячкин дает следующую формулу: /~3 £ D с? А V 2 1-г- Zmy* Фиг. где Е-модуль упругости стебля, D-диаметр стебля, д-толщина стенок стебля, А- стрела прогиба на высоте срезания стебля I, ту - момент инерции стебля и г- радиус кривошипа. Отсюда следует, что: 1) число оборотов, а следовательно, и скорость ножа, д. б. больше для мягких стеблей травы; 2) скорость ножей, пробегающих два промежутка между пальцами (в сноповязалках), д. б. меньше; 3) число оборотов д. б. тем больше, чем толще стебли; 4) число оборотов д. б. тем больше, чем выше подрезается стебель; 5) число оборотов д. б. тем больше, чем легче колосья. Длина пробега ножевой пластинки S более двойного радиуса кривошипа 2 г вследствие того, что центр кривошипа находится выше средней плоскости движения ножей на некоторую величину h; т. о., ширина пластинки, а также и расстояние между центрами сечений пальцев д. б. меньше 2 г; при стандартной величине S, радиус кривошипа д. б. менее - Геометрические соотношения между величинами S, г и ?i м. б. получены из следующих уравнений (фиг. 7): sin(a-) sin а sin/3 /г =(Л-г) sin Д = (i - г) sin а, (2) S = V li + rr-h* - V (I - г) - h, (3) где I-длина шатуна, а и 13-углы наклона шатуна в мертвых положениях кривошипно-шатун. механизма. Из ур-ий (1) и (2) получается: S = (, (4) sin а sin Т. е., чем больше высота расположения оси кривошипа, тем больше пробег ножа; в косилках он значительно больше, чем в жнеях, т. к. пальцевый брус последних движется на большей высоте над землей и h соответственно меньше. Из ф-л (3) или (4) определяется величина пробега пластинки в современных машинах. Из ур-ия (3) можно получить проектируемый размер радиуса кривошипа г по данной величине пластинки S: 4P-S Аналитическое определение сил инерции кривошипно-шатун-ного механизма Ж. м. В виду того, что центр кривошипа О (фиг. 8) находится на высоте h над ножевой полосой, перемещение X точки В может быть определено из следующих соотношений: X = {г cosy - I С08 § - г cos а , к = г sin а , h := (г + 1) sin у , к-\-h = l sin , где i-длина шатуна, г-радиус кривошипа. Из этих ур-ий определяем перемещение х: X = }/(r + l)-h- г COS а - г j/7(L±, ИЛИ, разложив подкоренное выражение второго корня по биному Ньютона, получим: x = / (г + 0 - h-~r cos а -,/ г sin а rh . при чем пренебрегаем третьим членом разложения по  Фиг. 8. его малости, т. к., напр., для косилок, при отношении г 1 /г \* - = 0,04 и sin а= 1, численное значение - I у sinaj = = 0,00000032. Перемещение точки В: У (r+l) -h -rcosa- 1 + sin п rh . , h Скорость точки в dx da I . , г . если принять, что угловая скорость кривошипа no-da стоянная, т. е. -тт = >. то: dt Sin а - sin 2 а + COS Ускорение для точки В получится после дифференцирования: dx da 3 5 = -гг. = ГШ COS а + у COS 2 а - у sin = гсо COS + у COS 2 а - у sin пренебрегая членом у cos 2 а получим: в виду его малости, = rcu COS а - у sin Следовательно, сипа инерции для точки В Величина сил инерции довольно значительна; напр. (для косилок), при скорости ножа vj ±2,5 м/ск и ускорении jj =±180 л1/ск, сила инерции на ноже Т=55кг; сила инерции на пальце кривошипа Т д =110 кг; последняя раскладывается на центробежную (до 110 пг) и тангенциальную (до 45 кг). Работа сил инерции от качающихся масс ножа и части шатуна, равная sa по.лный оборот нулю, в течение V* оборота м. б. выражена ф-лой: L = J* тшх dx или в единицах мощности: /со /4п\ inmior (4n\ 4r?i 60/~2 : 0,00045 rnco nr IP. 2-75 V60; 2-75-60 Работа сил инерции от горизонтально движущихся масс, напр. в косилках,-от 0,75 до 1 № и от вертикально движущихся масс-от 0,2 до 0,4 №. Виды Ж. м. Машины для уборки хлебов и трав можно подразделить на два главных класса: 1) косилки, к-рые оставляют срезываемые ими стебли на том же месте, где они росли, и 2) жнеи, приспособленные к тому, чтобы непосредственно после срезывания собирать стебли в особые кучи пли снопы. Ж. м. последнего класса, в свою очередь, можно сгруппировать в три вида: а) лобогрейки, к-рые кладут срезанные стебли на платформу машины, откуда они сбрасываются в виде снопов вручную, б) жнеи-самосброски (грабельные), которые автоматически складывают снопы на землю, и в) сноповязалки, которые, кроме того, связывают снопы шпагатом. Особняком нужно различать особые машины (х е д д е р ы), к-рые собирают лишь одни колосья, и н н е и-м олотилки и стрипперы, которые на месте ле и молотят срезанные колосья. I. Косилки. Эта группа жатвенных машин применяется для срезывания травы и полеглого хлеба. Устройство косилки изображено на фиг. 9: рама 1 опирается на два ходовых колеса 2 и для запрялхки имеет дышло 5; к основной раме при помощи шарнирных тяг 4 присоединяется пальцевый брус 5, в к-ром скользит яож (к о с а) б, приводимый в дви-иоение от шатуна (косогона) 7. Для отодвигания срезанной травы имеется доска 8, снабженная палкой. Близ сиденья для рабочего 9 расположены рычаги для подъема 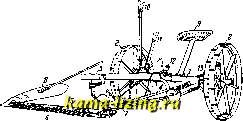 Фиг. 9. пальцевого бруса 10 и для наклона пальцев 11, а. также педаль 12 для подъема бруса и педаль 13 для включения механизма. Паль-певый брус опирается на два башмака, имеющие внизу стальные полозки, которыми они скользят по поверхности почвы. Этими полозками можно регулировать расстояние бруса и режущего аппарата от земли. Башмаки должны всегда прилегать к земле и скользить по ней, следуя всем неровностям и придавая брусу соответствующее, положение. Для осуществления подвижности пальцевого бруса относительно основной рамы имеются необходимые шарнирные соединения. При работе косилки, кроме установки полозков, надо дать соответствующий наклон пальцам помощью рычага наклона. Для приподнимания бруса над землей служат рычаг наклона и педаль; первый применяется при переезде косилки с одного места работы на другое, вторая же- во время самой работы, когда встречается какое-нибудь препятствие, а также при поворотах, заездах или осаживании лошадей назад, так как при этом нельзя выпускать вожжей из рук. Двигающий механизм косилки обычно состоит из двух пар зубчатых колес и кривошипной передачи; кроме того, имеются храповой механизм для автоматического включения и вык.чючения передаточного механизма и сцепная муфта для включения и выключения от руки или педалью. Ходовые ко.теса косилки снабжены рифами (выступами), во избелсание скольнеения, так как работа ножей зависит от вращения колес. Опыт показывает, что проскальзывание колес все же составляет ок. 5%. Устройство храпового механизма в ступице колес видно из фиг. 10. Благодаря этому устройству, при движении косилки назад (осаживание лошадей), механизм разобщается от ходовых колес. Число собачек в храповом механизме бьшает различно, но каждый раз включается в работу только одна из них; по б. ч. ставится лишь потри собачки, и в таком случае при сцеплении одной собачки с зубом другая будет находиться от зуба на расстоянии Vs ширины зуба, а третья- 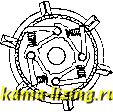 Фиг. 10. на 2/з- Такое расположение собачек необходимо для более быстрого включения механизма ножа во избежание забивания пальцев травой. Зубчатые колеса (фиг. 11) ставят обычно в количестве двух пар: одной-цилиндрической и другой-конической; постановка третьей пары вызывает лишнее сопротивление и потому теперь не применяется. В первой паре обыкновенно имеются цилиндрич. зубчатки, а во второй-конические; такая постановка предпочтительнее. Цилиндрич. зубчатки м. б. с внутренним зацеплением (Диринг, Ос-борн, Адриане, Вуд) или внешним (Мак-Кормик, Массей-Гар -рис); внутреннее зацепление более плавно ж прочно, но сильнее засоряется, чем внешнее. Зубчатая передача в косилках де.тается ускорительная; передаточное число, т.е. число, показывающее, сколько оборотов сделает последняя зубчатка (и кривошип) на один оборот первой зубчатки (и ходового колеса), для косилки Диринга составляет:  Фиг. 11. Z, Z, 83 46 = 26,51 , ZfZi 12 12 а для косилки Мак-Кормика: 67-55 12-12 = 25,59 . Т.о., на один оборот ходового колеса кривошип делает 26 оборотов, а нож-26x2=52 хода; при скорости движения лошади 1 м1ск, ходовое колесо, имеющее в среднем диаметр 0,8 м, делает один оборот в 2,5 ск. а число ходов ножа в 1 ск. составляет ок. 21, или 600 ООО ходов за 8-часовой рабочий день; при скорости трактора в 1,25 м/ск, получается в день 750 ООО ходов. Для включения и выключения механизма .на ходу косилки вперед ставят сцепные муфты раз.тичной конструкции. Сначала в коси.г[-ках Диринга, а затем и в большинстве других, было введено автоматич. выключение механизма при подъеме пальцевого бруса. Автоматич. выключение важно потому, что при поднимании пальцевого бруса без выключения механизма, последний продолясая работать, моясет вызвать поломку шатуна. Кривошипный механизм передает движение из плоскости вращения кривошипа в плоскость движения ножа. Плоскость вращения кривошипа не во всех косилках имеет вертикальное направление; в косилках типа Мак-Кормика, Новь, Крупна, Дейтше-Верке она составляет угол с вертикальной плоскостью, в косилке же Диринга она почти вертикальна. Плоскость движения ножа (иерпендикулярная к средней плоскости ножевых сегментов) не может быть горизонтальна, так как пальцевый брус устанавливается под различными углами к горизонту. Поэтому кривошипный механизм в косилке является не плоским механизмом, как, например, в яшеях или в паровых машинах, а пространственным; пространственный механизм должен состоять из семи шарниров, в отличие от плоского, где достаточно четырех шарниров. По схеме кривошипного механизма, представленной на фиг. 12, один шарнир (соединение с пальцевым брусом) заменен ползуном; следовательно , получаются д.ля плоского механизма три шарнира , В и С и один ползун D. В пространственном кривошипном механизме один шарнир такягс заменен ползуном В, другие два шарнира, соединяющие шатун с Четырехшармирныи механизм жнеи . 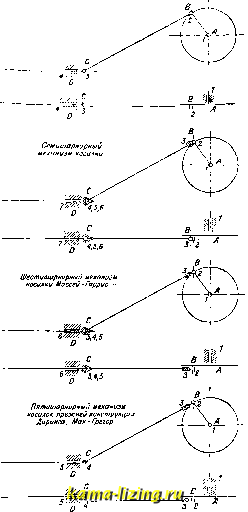 Фиг. 12. кривошипом И ножевой полосой, д. б. услол:-нены для обеспечения достаточной подвия:-пости в шарнирах при выходе шатуна из плоскости вращения кривошипа, сводной стороны, и из плоскости движения ножа,- с другой. Для этого необходимо и достаточно было бы поставить вместо простых шарниров шарниры Гука (Кардана) в точках В п С. В точке В так обыкновенно и делается, т. е. здесь имеется соединение двух шарниров-г. н. карданов подвес (см.), но при соединении шатуна с ножом в точке С такого шарнира было бы недостаточно, т. к. шатун при выходе из одной плоскости в другую,
|