
|
|
|
|
Литература --> Изомерия в производственном цикле зывает отставание тока 1 от эдс Eog, вследствие чего возрастает реактивная составляющая первичного тока Ii sin (р и ухудшается cos машины. Если при помощи добавочной эдс Efi: уменьшить скорость двигателя, то реактивное сопротивление sxz при том же моменте на валу и том же вторичном токе сильно возрастет по отношению к активному Ei, благодаря чему уменьшится cos Фа = ,yh= , а вместе с ним и cos®,. т. о., двигатель при нижесинхронной скорости будет работать при одинаковом моменте на валу с более низким cossi, чем при нормальных условиях без добавочной эдс Е. Если же при помощи этой эдс перевести его на вышесинхронную скорость s<0, то при двигательном режиме знак момента и тока Ii сохраняется, но знак реактивного сопротивления -sx-i изменяется на обратный. Благодаря этому реактивное сопротивление -SX2 вызывает сдвиг первичного тока Jj в сторону опережения, т. е. это сопротивление начинает в этом случае играть роль емкости, улучшая cos 9? двигателя. При вышесинхронной скорости двигатель, с увеличением нагрузки от холостого хода, может начать уменьшать реактивную составляющую первичного тока /jSin 9?1, а не увеличивать ее, как это бывает при обычных условиях работы двигателя. После того как возрастание нагрузки заставит двигатель перейти через синхронную скорость 5=0 и он начнет работать далее при нижесинхронной скорости s > О, это благоприятное влияние вторичного реактивного сопротивления уже исчезает, и оно вызывает соответствующее уменьшение cos ср. При работе асинхронной машины с добавочной эдс Eff. выше- и нижесинхронной скорости в генераторном режиме, реактивное сопротивление вторичной цепи, благодаря изменению знака тока Jg на обратный, оказывает противоположное влияние на cos (р. В этом случае при нижесинхронной скорости реактивное сопротивление вторичной цепи увеличивает cos 9З1, а при вышесинхронной уменьшает его. Вышеописанное свойство асинхронных двигателей имеет существ, значение для понимания характера круговых диаграмм компенсированных и коллекторных шунтовых двигателей, а также каскадн. соединения асинхронного двигателя и коллекторной машины. е) Каскадное соединение двух асинхронных двигателей. В этом случае во вторичную Г ШТТ\. систему первого дви- гателя добавляется обратная эдс от второго двигателя. Т. к. оба двигателя работают на общий вал, то энергия скольжения первого двигателя является полезно использованной, и потому система дает хотя и ступенчатую, но достаточно экономичную регулировку скорости. При каскадном соединении оба двигателя д. б. соединены и электрически и механически (фиг. 33). Синхронная скорость каскада равна где Pi и Ра-числа пар полюсов двигателей. Фиг. 33. Двигатель, присоединенный к сети, работает со скольжением s = ; поэтому подведенная к нему мощность при пренебрежении потерями преобразуется в. части в механическую, а в части Pj 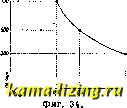 Pl+Pt - Pl + Pt в электрич. энергию, к-рая вторьш двигателем превращается также в механич. энергию на общий вал. Благодаря этому два двигателя в каскаде могут развивать ту же мощность Pi, что и один двигатель, т. е. каскад работает при постоянной МОЩНОГО сти. Если двигатели имеют одинаковую мощность, но разное число полюсов, то они дают возможность получать три ступени скорости: две, соответствующие их синхронным скоростям и одну для каскада 60 / /!;°° р +Р фиг- 34 представлена зависимость вращающего момента от скорости для двух двигателей с числами полюсов Pi = 6 и Р2= 4. Если выполнить,- кроме того, каждый из двигателей на два различных числа полюсов, то число ступеней скоростей м. б. еще более увеличено. Т.к. частота /а и напряжение Fa для второго двигателя меньше Д и Fi для первого 1 Pi -2 двигателя в раз, то поток Ф и намаг- Pi + Pa ничивающий ток второго двигателя приблизительно равны этим же величинам для первого. Намагничивающие токи обоих двига- 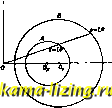  Фиг. 35. Фиг. 36. тел ей доставляются сетью, питающей первый двигатель, поэтому намагничивающий ток каскада приблизительно в два раза больше, чем для одного двигателя. При каскадном соединении двух двигателей их эквивалентные реактивные сопротивления оказываются соединенными последовательно, поэтому диаметр круговой диаграммы, обратно пропорциональный, по ф-ле (30), сумме реактивных сопротивлений, оказывается соответственно уменьшенным. На фиг. 35 представлены круговые диаграммы одного двигателя В и двух, соединен, в каскад А; из диаграммы видно, что перегрузочная способность и cos <р каскада меньше! чем одного двигателя. На фиг. 36 представлены экспериментальные круговые диаграммы каскада для двух двигателей с числами полюсов 2р=4. Цифры на диаграмме соответствуют скоростям аггрегата. Каскадные соединения находят себе при-  Фиг. 37. менение, например, при электрической тяге двигателями трехфазного тока. ж) Каскадное соединение асинхронного двигателя и одноякорно-го преобразователя (сист. Кремера, фиг. 37). Ротор главного асинхронного двигателя А соединен в этом случае с контактными кольцами стороны переменного тока одно-якорного преобразователя О, сторона постоянного тока к-рого соединена с коллектором двигателя постоянно-,i=jiMi UJ н. го тока D, механиче- llll \ \М связанным с ва- ч-р ДQJJ главного двига- теля А. Одноякорный преобразователь и двигатель постоянного тока получают возбуждение от независимой цепи постоянного тока. При изменении возбуждения двигателя D изменяется его напряжение. Между этим двигателем и преобразователем О устанавливается уравнительный ток, изменяющий момент двигателя D. Вследствие этого нарушается равновесие между моментом, приложенным к валу, и суммой моментов, даваемых двигателями А и D на валу аг-грегата. Последний начинает изменять свою скорость, благодаря чему изменяются одновременно и частота /г на кольцах преобразователя О и его скорость. В результате этих изменений система приходит к новому равновесному положению. Таким образом, каждому значению силы тока возбуждения двигателя D соответствует некоторая определенная скорость аггрегата. Эта система дает возможность регулировать скорость главного двигателя А в пределах от 4 - 5 до 40-45% ниже его синхронной скорости. Двигатель D должен быть рассчитан приблизительно на мощность максимального скольжения главного двигателя таким образом, при 30% регулировки он должен иметь мощность 0,3 от мощности двигателя А. Одно-якорн. преобразователь в этом случае рассчитывается также на мощность 0,3 от мощности главного двигателя А при соответствующем числе периодов /a=0,3/i. Система Кремера строится почти всеми крупными электротех-ническ. фирмами. В СССР эта сист. выполняется Харьковским электромеханич. з-дом. Т. к. в системе Кремера мощность скольжения главного двигателя используется при помощи двигателя D, механически соединенного с валом главного двигателя, то эта система дает наилучшее использование всего аггрегата при работе его с постоянной мощностью на валу, хотя, конечно, в случае необходимости система Кремера может быть использована и для работы с постоянным моментом на валу. В этом случае при малых скоростях аггрегат оказывался бы неиспользованным; поэтому обычно применяется система, в к-рой двигатель постоянного тока соединяется не с валом главного двигателя, а с асинхронной машиной, работающей в режиме генератора при скорости прр1близи-тельно постоянной, при чем энергия скольжения возвращается в первичную цепь. з) Каскадное соединение асинхронного двигателя с преобразователем частоты. Преобразователь частоты состоит из якоря, обмотка :сото-рого соединена с одной стороны с коллектором, а с другой стороны с контактными ко.ль-цами. Если к кольцам такого двухполюсного якоря подвести напряжение Fi многофазного тока с частотой /i и вращать якорь с числом /г об/ск., то число периодов на щетках коллектора будет равно/j,.=/i +/г. Знак (-f) соответствует направлению вращения якоря в направлении вращения поля относительно него, а знак (-) -обратному направлению. В последнем случае, при /i = /г, 1щ.=0, т. е. на коллекторе получается постоянный ток. Напряжение на коллекторе будет равно напряжению на контактных кольцах при любых соотношениях частот /i и . Для изменения напряжения на коллекторе нужно изменять напряжение на кольцах. Статор преобразователя частоты не имеет обмотки и служит только магнито-проводом для поля якоря. Статор может даже отсутствовать и быть замененным железным кольцом, надетым на якорь и вращающимся вместе с ним. Преобразователь частоты С (фиг. 38) дает возможность преобразовывать энергию частоты скольжения главного двигателя А в энергию частоты сети, возвращая ее обратно . в первичную сеть, для чего он д. б, соединен на одном валу с главным двигателем А. Если при помощи трансформатора Т, питающего кольца преобразователя С, уменьшить напряжение на коллекторе до величины, достаточной только для покрытия омич, падения напряжения в роторе главного двигателя А, то последний достигает своей синхронной скорости, получая от преобразователя постоянный ток. При изменении с помощью того же трансформатора Т знана, напряжения на коллекторе на 180° двигатель может переходить со скорости нижесинхронной на вышесинхронную и обратно. Правильный угол сдвига фаз между эдс ротора, двигателя А и напряжением, даваемым преобразователем частоты С, устанавливается поворотом щеток на коллекторе. Схема фиг. 38 дает возможность изменять скорость двигателя приблизительно до 10% выше и ниже его синхронной скорости. Более высокая степень регулировки затрудняется тяжелыми условиями коммутации преобразователя частоты. Система дает правильные условия использования асинхронного двигателя при работе его с постоянным моментом на валу и в таком виде выполняется фирмами AEG, Thomson Houston и др. Если же энергию скольжения передать с колец преобразователя частоты на синхронный двигатель, хсоторый соединен механически с главным двигателем, то система дает регулировку скорости при постоянной мощности. В таком виде она выполняется фирмой Westinghouse. Фиг. 38. и) Каскадное соединение асинхронного двигателя с коллекторной компенсированной машиной с роторным возбуждени-е м, системы Кожисека (Kozisek). Если в схеме фиг. 38 заменить преобразователь частоты трехфазной коллекторной компенсированной машиной с возбуждением на роторе, то эта машина при нижесинхронной скорости главного двигателя будет работать в режиме двигателя, а при вышесинхронной Скорости-в реншме генератора. Благодаря этому весь аггрегат дает наилучшее использование при работе с постоянной мощностью на валу. В коллекторной компенсированной машине щетки занимают вполне определенное место на коллекторе; поэтому регулировка фазы добавочной эдс по отношению к вторичной эдс двигателя достигается особым трансформатором фаз в виде асинхронного двигателя с заторможенным ротором (см. ниже-о потенциальном регуляторе). В отличие от схемы с преобразователем частоты здесь через контактные кольца проходит лишь незначительный намагничивающий ток, необходимый для возбуждения коллекторной машины. При более мощных установках желательно иметь на кольцах коллекторной машины частоту, более низкую, чем в первичной цепи, т. к. в этом случае можно получить несколько более высокое напряжение на коллекторе. В этом случае возбуждающий ток для коллекторной машины К получается от специального синхронного генератора-возбудителя G, приводимого во вращение синхронным двигателем В (фиг. 39). Синхронный возбудитель выполняется с неподвижными полюсами и вращающимся якорем и имеет мотки возбуждения а и Ь, сдвинутые в пространстве на 90 электрич. градусов. Регулируя ток в одной обмотке возбуждения, можно изменять скорость главного двигателя, при регулировке второй обмотки изменяется .дишь фаза добавочного напряжения и вместе с ней cos (р главного двигателя. Схема.Кожисека дает возможность регулировать скорость мощи, асинхронных двигателей до 10% выше- и нижесинхронной скорости. Эта схема выполняется фирмой SSW. к) Каскадное соединение асинхронного двигателя скомпенсированной коллекторной машиной свозбуждением на статоре (сист. ПГербиуса). В данной схеме применяется трехфазная компенсированная коллекторная машина Шербиуса с явно выраженными полюсами и возбуждением на статоре. Эта машина соответствует машине постоянного тока, которая имеет на каждом двойном полюсном делении три явно выраженных полюса j возбуждаемых трехфазным 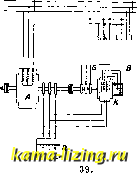 Фиг.  Фиг. 40. током. Шаг обмотки ротора равен 120 электрическим градусам вместо 180°; поэтому оба коммутируемых в пазе витка, как верхний, так и нижний, попадают в пространство между главными полюсами а под коммутирующее поле добавочного полюса d (фиг. 40). .Машина имеет последовательные и шунто-вые добавочные полюса, поэтому она имеет совершенную коммутацию при изменении как нагрузки, так и частоты и напряжения. Установка по схеме Шербиуса, видоизмененная для получения вышесинхронной скорости фирмой GEC, представлена на фиг. 41. Здесь А-главный асинхрон- ный двигатель, К-коллекторная машина Шер-биуса, М - асинхронная машина, соединенная на одном валу с машиной К, С-преобразователь частоты, Т- трансформатор, питающий кольца преобразователя С, и R-пусковой реостат. Напряжение от колец двигателя А через секционированный автотрансформатор t подводится к шунтовой обмотке возбуждения коллекторной машины К. Каждому ответвлению автотрансформатора t соответствует- определенный ток возбуждения и определенное напряжение коллекторной ма-шины£ и, следовательно, нек-рая определенная скорость двигателя А. При синхронной скорости напряжение на кольцах двигателя А равно нулю; поэтому машина К теряет возбуждение от колец двигателя А. Для перехода через синхронизм служит преобразователь частоты С, дающий необходимое возбуждение коллекторной машине К для работы при синхронной скорости и вблизи нее. Система Шербиуса GEC дает возможность регулировать скорость двигателя до 25% выше- и нижесинхронной скорости. Выполняется эта система фирмами ВВС и GEC. 12. Регулирование со&<р асинхронного двигателя, а) Принцип регулирования cos (р. Если добавочная эдс Е сдвинута от основной эдс sEz на 90°, то вызываемый ею TOKlgK. совпадает по фазе или направлен навстречу магнитя, потоку Ф [т.е. sin(22 ., Ф)=0], поэтому, согласно формуле (22а), не может вызвать вращающего мо- Ш- мента и изменения скорости. Так как при Fi= J jl t= Const и поток Ф v. равен Const, то добавочная мдс, созданная током IgK. не может вызвать изменения Ф, требующего для своего поддержания нек-рой вполне определенной.мдс. Наличие добавочной мдс вызывает лишь соответствующее увеличение или уменьшение мдс, создаваемой током первичной системы. Т. о., вторичная цепь создает в первичной цепи добавочную 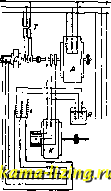 Фиг. 41.
|