
|
|
|
|
Литература --> Изомерия в производственном цикле Полная векторная диаграмма асинхронного двигателя при учете активного первичного сопротивления представлена на фиг. 11: здесь - Eg представляет собою составляющую первичного напряжения, которая урав-новепшвает обратную эдс Е, индуктированную в первичной цепи потоком взаимоиндукции Ф; E2s=sE-эдс, индуктированная потоком Ф во вторичной цепи и отстающая от этого потока на 90°. Ток вторичной системы отстает на угол ?>.2 от эдс Eg вследствие влияния реактивного сопротивления этой цепц 2?г/ 1/2= 52. Угол 9? а определяется соотношением cos = (12) и меняется с изменением скольжения .9. Сила тока в обмотке статора 1 должна создавать вращающийся магнитный поток Ф и одновременно компенсировать размагничивающее действие тока 1 вторичной обмотки. Если представляет мдс ротора, совпадающую по направлению с током Jg, а OF-результирующую мдс, необходимую для создания потока взаимоиндукции Ф при отсутствии тока в роторе, то мдс статора должна равняться геометрическ. сумме векторов OF = = OF + FF. Последний вектор равен, но прямо противоположен мдс ротора OF2- Вектор OFi в определенном масштабе одновременно выражает ток в статоре li. Результирующая мдс OF благодаря влиянию гистерезиса опережает вектор магнитного потока Ф на небольшой угол (р. Напряжение на зажимах первичной обмотки состоит из трех слагающих: Fi = - + J1R1+ Тхг. (13) С возрастанием нагрузки и тока 1 ели-чиваются падения напряжения IR- и IXi, поэтому начинает несколько уменьшаться эдс - jBj и, пропорционально, поток взаимоиндукции Ф. в) Вращающий момент и мощность. Рассмотрим для простоты работу двигателя с ротором в виде беличьей клетки. При нагрузке двигателя его ротор отстает от вращающегося поля, и в проводниках ротора индуктируются токи, число периодов которых пропорционально скольжению. При малых скольжениях реактивное сопротивление роторной обмотки sxg весьма мало по отношению к активному R, поэтому ток ротора 1а практически совпадает по фазе с вызывающей его эдс sEz- Т. к. кривая распре деления величин эдс, индуктированных в отдельных проводниках ротора, совпадает в случае беличьей клетки с кривой распределения индукции вдоль воздушного зазора, а токи в проводниках пропорциональны эдс, то кривая распределения токов 1 будет совпадать с кривой распределения индукции В (фиг. 12). Кривая К, пропорциональная  Фиг. 12. произведениям значений Jg и В для каждой точки, очерчивает ординаты, равные механич. силам, действующим в данный момент на отдельные провода ротора. Эта кривая неизменна для различных моментов времени и перемещается вместе с кривой распределения поля, откуда следует, что многофазные асинхронные двигатели дают для данной нагрузки постоянное среднее окружное усилие Кдр, и постоянный вращающий момент независимо от положения ротора. Если двигатель работает при столь значительном скольжении s, что реактивное сопротивление SX2 становится уже достаточно большим по отношению к активному сопротивлению R2, то сила тока 1 начинает отставать по фазе от эдс sEg на угол Ра и кривые распределения тока I2, поля В и окружных усилий к принимают вид, показанный на фиг. 13. Вследствие несовпадения кривых поля В и тока Ja- на нек-рую часть проводников будет действовать механич. сила Ki, направленная противоположно движению поля; в результате, при той же силе тока I2 в роторе, среднее окружное усилие Кр и вращающий момент получаются меньшие. Мощность, передаваемая со статора на ротор, е- во 75 ° 0,975 если вращающий момент измеряется в кгм, а скорость-в об/м. Ротор имеет скорость Пр, об/м., поэтому на его окружности развивается мощность М-Пр.  Фиг. 13. - Qm - Р2 - (15) Р 0,975 где Ра-мощность на окружности ротора и Qm-механич. и добавочные железные потери двигателя. Разница мощности и Pg, необходимая для образования тока в роторе, превращается в его обмотках в джоулево тепло. Потеряьш на токи Фуко и гистерезис в нелезе ротора Q. при малой частоте /2 = /i5 можно пренебречь, поэтому а = Р.-Р, = sPe = mallEa 0,975 (16) т. о., передаваемая со статора на ротор мощность идет, с одной стороны, на создание полезной мощности на валу Р., а. с другой стороны-на покрытие потерь в обмотке ротора Qjn. и механич. добавочных потерь Qm-Из предыдущего стхедует, что Р, = Р. - = Р. Pe(l-S), (17) (18) (19) Электрич. мощность Q,. теряемая в роторе, пропорциональна скольжению s и зависит от сопротрщления Еа поэтому для получения хорошего кпд R2 Д. б. возможно меньше. Мощность Pg может быть выражена также и через электрические величины двигателя: Pg = mEJi cos tpz, (20) Ez = nV2 гокхФ 10-8 вольт, (21) Из равенств (14), (1), (20) и (21) следует, что момент (в кгм) М = 7,22 тикрХФ cos (р Ю = = кХФ cos . (22) Между потоком, сцепляющимся с некоторым витком, и эдс этого витка имеется сдвиг по фазе на 90°. Т. к. между током и эдс витка имеется сдвиг по фазе на угол 9?2> то между током Jg и потоком Ф получается сдвиг по фазе на угол (90 + 92); поэтому в формуле (22) мононо заменить cos 9? 2 через sin (90+9? 2) или 81п(Ф, Ig); отсюда Ж = fcJ2Фsm(Ф, J2). (22а) На поверхности и в толще зубцов статора и ротора получаются еще добавочные поверхностные и пульсационные потери Q благодаря колебаниям величины поля от наличия зубцов. Эти добавочные потери Q. действуют на уменьшение полезного вращающего момента точно так же, как и механические потери Q, поэтому Pp. = Р2 - Qm = Р2-Яш- Qd. (15а) Подведенная к статору мощность Pi больше мощности Pg на величину джоулевых потерь в статорнойобмотке Q. и потерь в железе на токи Фуко и гистерезис Q поэтому Pi = miFiii cos (Рг = Ре + Qm., + 9ж. == = Р,-ЬЗВД + д. (23) г) Максимальный вращающий момент. Заменяя в выражении (22) для вращающего момента М ток Jg и cos<j3 2 их значениями из ф-л (8) и (12) и принимая во внимание ф-лу (21), получаем, что 1г = ьф-i . (2Л\ Д5 + -с.) Ri+isx,) М = кФ Пренебрегая относительно небольшим изменением потока Ф под влиянием первичных падений напряжения под нагрузкой и заменяя кФ через постоянную С, получаем, что При небольших скольжениях член sxl ничтожно мал по сравнению с Е, поэтому можно считать знаменатель постоянным и момент М пропорциональным скольжению. При дальнейшем увеличении скольжения знаменатель начинает возрастать, и момент увеличивается не пропорционально скольжению, а несколько меньше. При нек-ром определенном скольжении момент Ж достигает максимума и затем начинает уже уменьшаться. Для нахождения максимума момента нужно взять в выражении (24а) производную от Ж по S и приравнять ее нулю: (25) Т. к. в этом выражении при Ж неравном нулю знаменатель не м. б. бесконечно большим, то числитель должен равняться нулю. Отсюда условие имеет вид: для максимума момента (26) Этот максимум наступает при тем большем скольжении, чем больше отношение кх. Из выражения (26) можно заключить, что ё = 1. (27) Т. о., вращающий момент достигает максимума, когда реактивное сопротивление sXz равно активному R. Подставляя значение S из Выражения (26) вформулу (24), получаем для максимального момента следующее выражение: (246) В это выражение не входит Да, поэтому Мгх не зависит от сопротивления ротора; но т. к. входит в общее выражение (24) для момента, то величина R влияет лишь на то. Двигатель Ofl а,в 0,8 уа Фиг. 14. при каком значении S момент Ж принимает максимальное значение. На фиг. 14 представлена зависимость Ж от скольжения S для одного из двигателей при четырех различных значениях Eg, что достигается включением в ротор добавочного сопротивления. Хотя все кривые различны, но для всех значение Мх одно и то же. Т. к. по достижении максимального момента двигатель теряет устойчивость, то этот момент носит название опрокидывающего. д) Начальный вращающий момент. На практике часто требуется, чтобы двигатель при пуске в ход развивал Мтах- этом случае, согласно ф-ле (27), Eg д. б. равно Жа, т. к. 5=1. Это достигается включением в цепь ротора такого добавочного сопротивления, чтобы Ей. + + Еа = я;2. Для двига-  Фиг. 16. Фиг. 15. теля фиг, 14 в этом случае получается кривая момента С. Если в ф-лу (24) подставить s= 1, то получится выражение для начального момента: е) Приближенная круговая диаграмма. Если сопротивления Ei, Ж1,Еа,я;2, ЕоИЖопостоянны,то при изменении скольжения s конец вектора тока 1х описывает окружность. Наиболее простой способ получения круговой диаграммы вытекает из приближенной эквивалентной схемы (фиг. 15), отличающейся от точной схемы (фиг. 7) тем, что намагничивающий контур выносится на первичные зажимы. Благодаря этому нагрузочный ток становится независимым от тока холостого хода Iq. В этом случае (28) 1о = - Ток Ц составляет с напряжением Fj угол (р, определяемый соотношением sin fp,= -i-i = 1+. (29) При s = 0, sin = 0 VI / (p-i = 0. Проведем (фиг. 16) перпендикуляр OX к направлению тока Jg при s=0 и восстановим из конца D вектора тока 0D = Д при каком-либо произво.тьном значении s перпендикуляр к линии бЪ до пересечения с линией ОХ в точке Е. Докажем, что для любого ОЕ = Const. Действительно, принимая во внимание ф-лы (28) и (29), имеем: 0 = - = - = --- = :=Const, (30) 8ш9>, sin*, Z,iiXi + Xi) Хп v / так как в выраж;ение для ОЕ не входит s. ОЕ назьшается идеальным током короткого замыкания. Прибавляя геометрически к 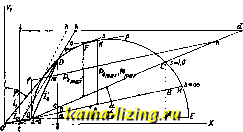 Фиг. 17. . вектору тока 0D вектор тока холостого хода 00= 1 о, получаем полную приближенную круговую диаграмму для резуль- тиртощего первичного тока: = J-f-Io (фиг. 17). ж) Мощности и моменты в круговой диаграмме. Согласно ф-ле (23), можно мощность, переданную со статора на ротор, представить в следующем виде: - Pi - ЩУИх - sigKi - Q.i (31) При увеличении скольжения потери на трение Q. и добавочные Qa. уменьшаются и становятся равными нулю при s=1,0, но взамен этого с увеличением скольжения возрастают потери в железе ротора Q.z> поэтому можно приближенно принять, что Q + Q. -- Q. Const. Обозначим сумму потерь 3J§JBi+ + Qm.j + Яж.2 + Qm. + Qd. ерез 0 и отнесем все эти потери к цепи намагничивающего контура; тогда можно считать, что РеРг-KnyRx-Qo (32) P2 = P,-3(iDi? (33) При постоянной частоте /i мощность Р, переданная со статора на ротор, выражает в масштабе синхронных ватт также и вращающий момент двигателя. Кпд двигателя V = p- (34) Скольжение двигателя, принимая во внимание формулу (16), rMJOKj . (35) Все эти величины м. б. найдены и из круговой диаграммы (фиг. 17). Точка С соответствует току Ig . короткого замьпсания (s=l); поэтому, согласно ф-ле (30), tga = Ri + Rj ОЕ Xi + X к ОЕ (El Н- Е0. (El + Щ) = (36) Деля вектор СА точкой В на отрезки СВ и ВА, пропорциональные Ei и R, имеем: tgp = k-ОЁ R; (37) tg а - tg /9 = Е . (38) При коротком замыкании вектор АС выражает в масштабе первичной мощности джоу-левы потери в первичной и вторичной цепях: ZC = fe (/;,)*. (El+ Е0; (39) ВА = к{П У- Rг, (40) ВС = к (Гг.У Rz. (41) Принимая во внимание ф-лы (36), (37), (38) и то, что отрезок О а = получаем, что для вектора Д = 0D при любом скольжении s отрезки ас, аЬ и be выражают соответственно в том же масштабе суммарные и отдельные джоулевы потери в обмотках статора и ротора; поэтому ас = Оа tg а =/с aD3-(Ei+E2) = =fc (1041 + 2); (39а) ab = Oa tg = fe а021 = ад)а Ei; (40а) bc = 0a(tga-tgP) = k OD Щ = к(Ц)Щ. (41a) Вектор ea выражает в том же масштабе потери холостого хода о- Т. о., первичная мощность Pi выражается вектором De; мощность, переданная со статора на ротор Р, и момент в синхронных ваттах-вектором Db; мощность на валу двигателя Р-вектором 1>с. Скольжение т,.(/;)..д;, (34а) Р, Db Коэффициент полезного действия (35а) з) Опред ел е ние скольжения из круговой диаграммы. Проводим линию Of перпендикулярно к линии 00 , проводим далее линию fn параллельно ОВ и полршем точку т на пересечении линии fn и 0D. Тр-к ОЬс подобен тр-ку Ofn, поэтому - = ~ Треугольник ObD подобен треугольнику Ofm, поэтому =
|
||||||||||