
|
|
|
|
Литература --> Бумажный брак в производстве Фиг. 5. иа крючок т.н. в о л о ч у ш к и Л (фиг. 5), представляющей собою обыкновенную доску с грузом Р, вес которого соответствует качеству вырабатываемой веревки. Далее идет процесс дополнительного докручивания веревки или пряди, состоящий в том, что крючку, иа который надет один конец веревки, дают вращение в сторону, обратную вращению при скручивании веревки или пряди. Веревка при этом получает дополнительное кручение и, сокращаясь в длине, подвигает волочущку к веревочному колесу. После получения определенной крутки, к-рую должна иметь веревка, рабочий прекращает вращение крючков, что соответствует заранее определенному укорачиванию веревки и заранее намеченному чертой месту, до которого должна дойти волочущка. Этим процессом докручивания заканчивается выработка веревки, после чего ее снимают с крючков и собирают в круг или моток, в каком виде веревка обычно и поступает в продажу. Для придания веревкам более красивого и гладкого вида их до снятия с крючков или протирают концами веревок или же смачивают разведенным клеем и т. п. полирующими веществами. Машинная выработка веревки производится тремя способами: 1) на комбинированных машинах, 2) на машинах, отдельно вырабатывающих пряди и отдельно скручивающих веревку, и, наконец, 3) путем выработки так называемой механической бечевы на канатных тягально-спускальных машинах с откатывающейся кареткой (см. Канатное производство). На фиг. 6 изображена горизонтальная комбинированная веревочная машина, выработка веревки на которой производится следующим образом. На передней части машипы закладываются катушки с каболками, из к-рых будет вырабатываться веревка. Эта  Фиг. 6. часть машины производит скручивание каболок в пряди, что происходит благодаря вращению с разными скоростями рамы А и рамы В, на к-рой находятся катушки с ка-бо-пками. Самое кручение происходит между крутильной трубкой и вращающимся роликом С. Далее, скрученные в прядь каболки через ролики а,Ъ, с иаправ.тяются к трубке D и затем, обогнув блочки Е, которые вращаются сами и кроме того вращаются вместе с рамой А, проходят через трубку F. После этого каждая прядь направляется в отверстие конуса д, и несколько прядей, образующих веревку, соединяются вместе у непо-движн. детали М. Этим заканчивается процесс свивания прядей и соединения их вме- сте для скручивания в веревку. Скручивание веревки осуществляется задней частью машины. Здесь также имеется вращающаяся рама N, внутри к-рой помещается веревочная катушка. Эта катушка вращается вместе с рамой и, кроме того, на своей оси. Скрученная прядь, пройдя зажим М и втулку Р рамы N, окончательно скручивается в веревку и навивается па веревочную катушку Q. Второй тип машин состоит из двух отдельных машин-для скручивания прядей и для скручивания веревки. Выработка веревки на этих машинах заключается в следующем. Катушки с каболками помещаются в особой раме, стоящей впереди машины (фиг. 7), и отдельные каболки через распределитель А (фиг. 8) направляются в крутильную трубку JB, а затем через вращающиеся желобчатые блочки а и 1 выводятся к направляющим блочкам, находящимся на рогульке М, и через них на катушку, имеющуюся на шпинделе машины (на фиг. 8 не указана). Скручивание каболок в прядь происходит благодаря вращению рогульки Ж. Блочки а и ФПГ. 1.  Фиг. 8. имея самостоятельное вращение от шестерни в 5 зубьев, сидящей на конце крутильной трубки, и шестерен по зубьев, жестко сидящих на осях блочков, осуществляют подачу пряди на рогульку и с нее на катушку. Число оборотов желобчатых блочков при одновремен. вращении рогульки и крутильной трубки равно разности между числом оборотов в результате вращения рогульки и числом оборотов желобчатых блочков, при условии, что рогулька является неподвижной. Из схемы машины определяем эту разность щ по формуле: подача I блочков в 1 м. = n-Ttd, где d. - диам. желобч. блочка в дм.; крутка 1 == = Для изменения величины подачи и крутки шкивы d и dl выполняются ступенчатыми. Производительность А однорогу-лечной машины за 8 часов выразится ф-.710й: nj-453-60-8 кр.кр.-ЗОО-36-lOOO или в общем виде: 0,02 кг в 8 часов, где щ-число оборотов рогульки, -коэффициент крутки, Nnp. равняется номеру каболки в английской нумерации, деленному на число каболок в пряди. Катушка, на к-рую наматывается прядь, сидит на скрепляющем диске и для правильного распололеиия рядов прядей имеет при помопщ червяка поступательное дви-лсение влево и вправо. Готовые пряди поступают па веревочную машину, которая состоит из двух частей: Л и В (фиг. 9). В части А надеваются катушки с прядями, где они при ра,боте машины подкручиваются вращением рогулек а, и ag. Докрученные т. о. нити проводятся через разрезные коиус и втулку, находяпщеся под давлением груза, в крутильную трубку М, далее огибают желобчатые блочки т, и через направляющие ролики, находящиеся на рогульке Ж (не изображены на схеме), поступают на веревочную катушку, сидящую на шш1н-деле машины. Устройство этой части машн-ны аналогично устройству машины д:1Я прядей. Расчет для веревочной машины одинаков с расчетом машины по изготовлению прядей. Из схемы фиг. 9 имеем: подача I желобчатого шкива будет: где и-число оборотов шкива машины в 1 м., 7tj5-окружность с диаметром d, равным сумме диаметров желобчат. блочка и пряди в дм.; крутка на 1 равна где - - приложено несколько спл 1,2,3,4 (фиг. 1, А), то равнодействующую этих сил получим, если мы найдем сначала равнодействующую Ri сил 1 и 2, затем сложим ее с силой 3 и, получив тем же способом равнодействующую сил Ri и 3, равную i?2, сложим ее с силой 4.   Поб/т Sft- Фиг. 9. число оборотов рогульки JV в 1 мин. Для изменения величины подачи и крутки отношение d/d-i осуществляется переменным- путем применения ступенчатых шкивов. Машины с отдельным приготовлением прядей и отдельным скручиванием их в веревку считаются более пригодными для изготовления веревок по сравнению с комбинированными машинами, так как с первых веревки получаются лучшего качества, чем со вторых. Машины дяя изготовления веревок строятся и вертикаль!!, типа, но за последнее время они выходят из употребления и заменяются горизонтальными машинами. Лит.: Бородин П. И., Русский шпагат, М., 1924; Вебер К. К., Канатн. и верев. производство, П., 1915; Лебедев Н. Н., Производство канатов и веревок. П., 1923; Новгородский М. П., Производство канатов, веревок и шнуров, СПБ, 1911; Петров Н. И., Канатно-веревочное производство, М., 1898; Леп и пенька , М.; Льняное дело , М.; Carter Н. R., Cordage Fibres, L., 1909; Woo d-house T. and Kilgour P., Cordage a. Cordage Hemp a. Fibres, L., 1919. Ф. Крашенинников. ВЕРЕВОЧНЫЙ МНОГОУГОЛЬНИК (В a- р и н ь о н а) имеет большое применение в графических расчетах. При помощи его решают все задачи, относящиеся к равновесию сил на плоскости, проводят построения деформаций систем и т. д. Когда к точке А Фиг. 1. Последняя равнодействующая R и будет равнодействующей всех данных сил. К тому я-се результату придем, если данные силы 1,2, 3 и 4 последовательно перенесем в плоскости параллельно самим себе и составим из них мн-к abode (фиг. 1, Б), в котором стрелки сил по его периметру были бы направлены в одну сторон у-по направлению двилсения часовой стрелки или противоположно ему. Тогда вектор ае, соединяющий начальную и конечную точки такого многоугольника сил (называемого силовым мн-ком, или планом сил), представит собой искомую равнодействующую R по ее ве-.пичине и направлению. Порядок, в котором соединяются данные силы при построении мн-ка сил, не имеет влияния на окончательный результат: при любом порядке собирания ch.;i получаем ту же по величине и направлению равнодействующую. Ес-~ .ПК силы, приложенные к точке А, образуют в плане сил замкнутый мн-к, то равнодействующая ихД=0, и силы взаимно уравновешиваются. Когда данные силы прилолтены к различным точкам плоскости и не имеют общей точки пересечения, то определение равнодействующей этих сил молшо сделать путем последовательного сло:кення их по правилу параллело-грама, как показано па фиг. 2. Но этот   Фиг. 2. способ оказывается неудобным для определения положеш1я равнодействующей, если силы пересекаются под очень острыми углами или вне пределов чертелса, и вовсе неприменим, когда силы параллельны между собой. Самым общим приемом сложения сил является сложение их при помощи построения В. м. Пусть даны силы 1, 2, 3 и4, приложенные к разным точкам плоскости (фиг. 3, А). Требуется найти величину и положение уравновешивающей Q этих сил. Данные силы соединяем в мн-к сил (фиг. 3, Б) и из него находим величину и направление уравновешивающей силы ea = Q (перемена направления силы Q делает ее из уравновешивающей-равнодействующей заданных сил 1,2,3 я 4). Выбираем произвольную точку О (называемую полюсом), проводим из нее к вершинам мн-ка сил лучи Оа, ОЪ, Ос,... и строим мн-к I, II, III, IV ж V (фиг. 3, А), начиная от произвольной точки А по направлению силы i, т. о., чтобы одноименные прямые на фиг. 3,Б (план сил) и на фиг. 3, А (поле сил) были между собой параллельны.  Фиг. 3. Прямые I, II, III, IV в. F на фиг. 3, Б (называемые полюсными лучами) можно рассматривать как силы, которые уравновешивают данные силы. Так, из рассмотрения замкнутого тр-ка сил ОаЪ (фиг. 3, Б) следует, что силы Оа и ОЪ уравновешивают силу 1. Точно так же ОЪ и Ос уравновешивают силу 5, и т. д. Тогда, взамен нахождения положения уравновешивающей силы Q заданных сил, можно отыскивать положение равнодействующей тех сил, которые уравновешивают заданные силы, что, очевидно, одно и то же. Но силы Пи iJ у точек Аи В, а также силы III и III у точек В и С и силы IV и IV у точек С и D, взаимно уни-чтолсают друг друга (фиг. 3, А). Остается, т. о., найти равнодействующую сил I и V, прилолсенных к точкам А и D. Эта равнодействующая, по положению, определяется пересечением сил 7 и Fb точке Е. Ряд прямых /, II, III, IV и V (фиг. 3, А) образует так называемый веревочный мн-к. При построении В. м. могут встретиться три случая: 1) конечная точка силового многоугольника е не совпадает с начальной его точкой а; в результате данные силы н е находятся в равновесии, их равнодействующая определяется по величине и направлению отрезком еа (фиг. 3, Б); 2) конечная точка силового мн-ка совпадает с начальной его Фиг. 4. точкой, и крайние стороны В. м. параллельны между собой; в результате данные силы приводятся к паре сил, как по-  казано на фиг. 4, где а есть плечо пары, а произведение 1а или Va=M-момент этой пары; 3) конечная точка силового мн-ка а совпадает с начальной его точкой, и крайние стороны В. м. (/и F) совпадают между   Фиг. 5. собой (силовой и веревочный мн-ки сами собой замыкаются); в результате получается равновесие системы (фиг. 5). При помощи веревочного мн-ка задача о разложении заданной силы Р (фиг. 6) на две параллельные ей составляющие А и В, данные по своему пололению, решается просто. Отложив в плане сил силу Р, выбрав произвольно полюс О и проведя лучи I и /, проводим их и в поле сил, начав с произвольной точки S на направлении силы Р. Прямая АВ даст тогда направле- ние второго луча, при помощи которого, проведя из полюса О прямую OS, параллельную АВ, разделим заданную силу Р на две искомые составляющие Аи В. Подобным же образом можно решить и обратную задачу, встречающуюся при Определении реакций опор балок: найти две параллельные, данные по положению силы А и В, которые находились бы в равновесии с двумя другими данными параллельными силами Pi и Ра (фиг. 7). Строим для этих сил план сил, берем точку О за полюс и строим В. м., начав его со второго луча на  Фиг. 6. 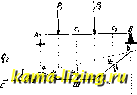  Фиг. 7. направлении реакции А. Так как при равновесии В. м., равно как и си.повой, должны бьггь замкнутыми, то искомые лучи J и F должны сливаться, а потому направление их определяется направлением замыкающей прямой аЪ. Проведя из полюса О прямую Os, параллельную аЪ, определяем реакцию А (как отрезок меноду лучами I и II) и реакцию В (как отрезок между лучами IV и V). В. ш. обладает тремя степенями свободы при своем построении, так как полюс О выбирается произвольно (т. е. произвольными являются две координаты, для полюса-две степени); кроме того в поле сил построение В. м. начинается с любой точки на заданном направлении 1-й силы (еще одна степень свободы), изменение полюса влечет за собой изменение контура В. м., но все они
|